

Variable-stiffness robot joint structure
A technology of robot joints and rigidity, which is applied in the direction of manipulators, mechanical equipment, program-controlled manipulators, etc., and can solve problems such as large weight, small output force, and small rigidity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0037]Embodiment 1: Under the condition of constant stiffness, only the joint structure of the present invention is allowed to rotate.
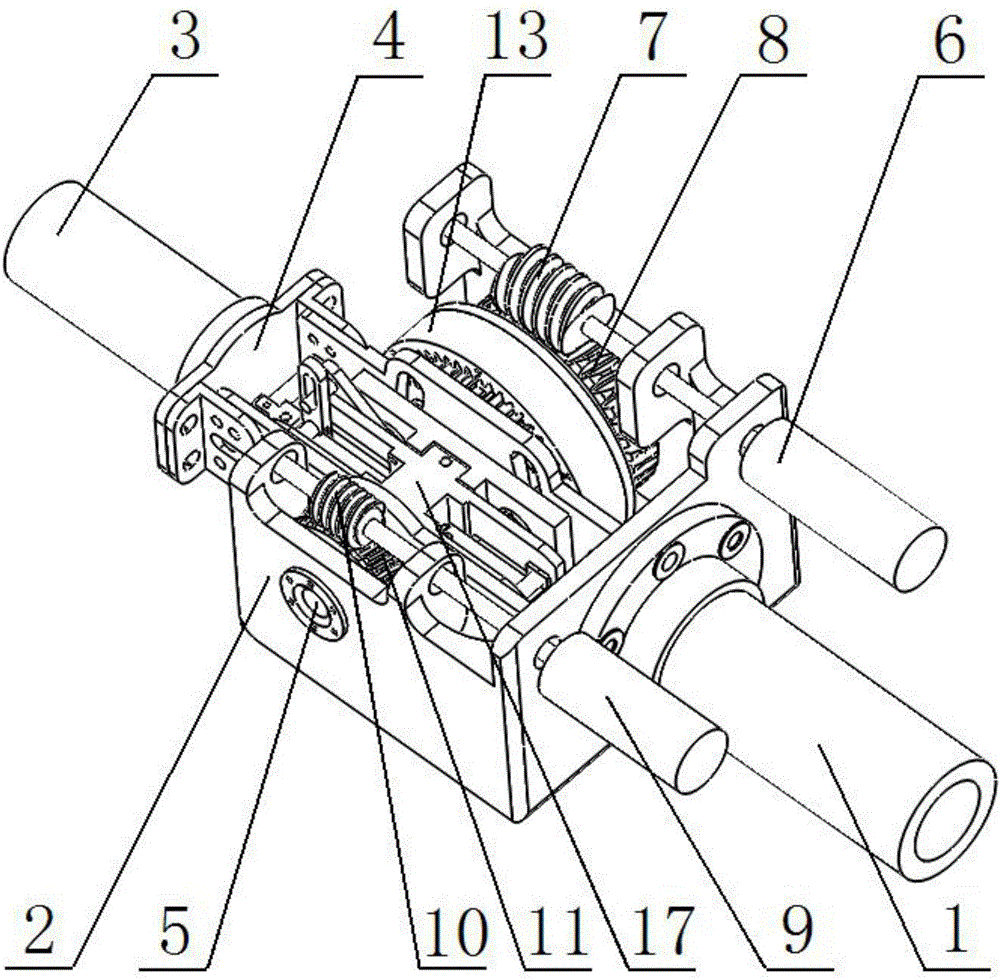
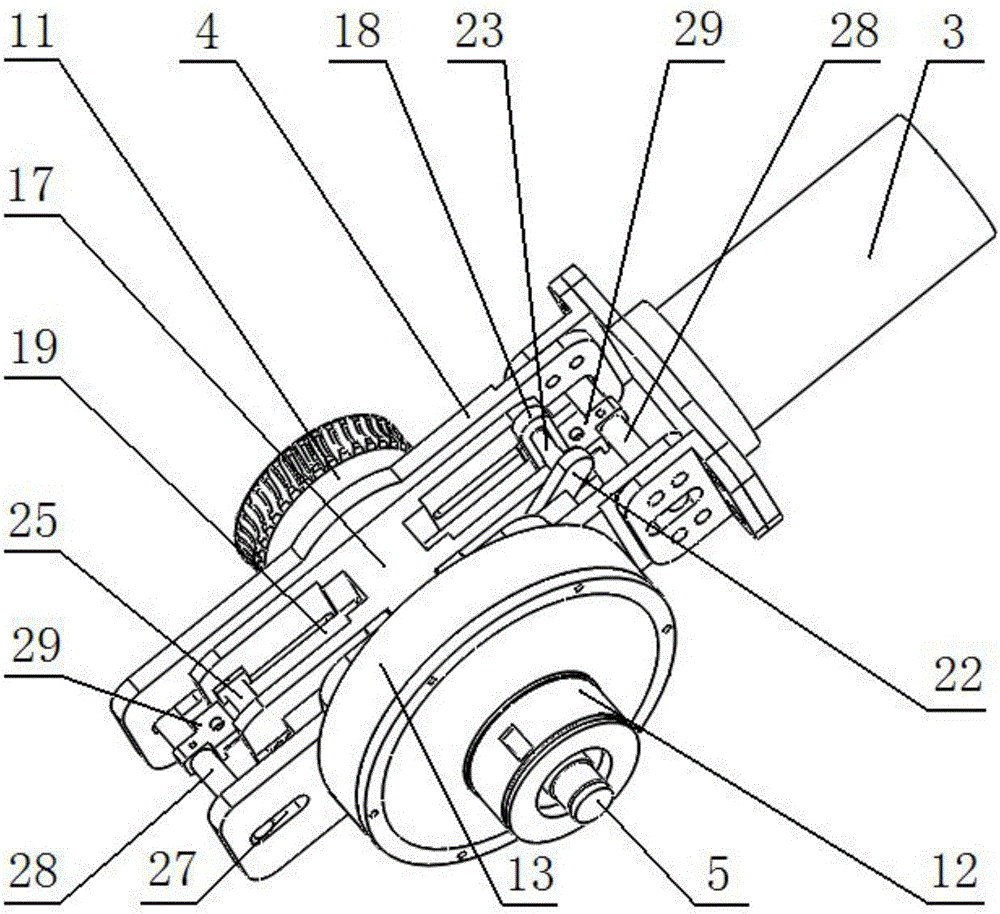
[0038] Start the first drive motor 6 and the second drive motor 9 simultaneously, drive the first worm screw 7 to rotate by the first drive motor 6, and then drive the first worm wheel 8 to rotate, drive the sleeve 12 to rotate by the rotation of the first worm wheel 8, and then drive The inner ring gear 13 rotates; the second drive motor 9 drives the second worm 10 to rotate, and then drives the second worm wheel 11 to rotate, and the rotation of the second worm wheel 11 drives the central shaft 5 to rotate, and then drives the sun gear 14 to rotate;
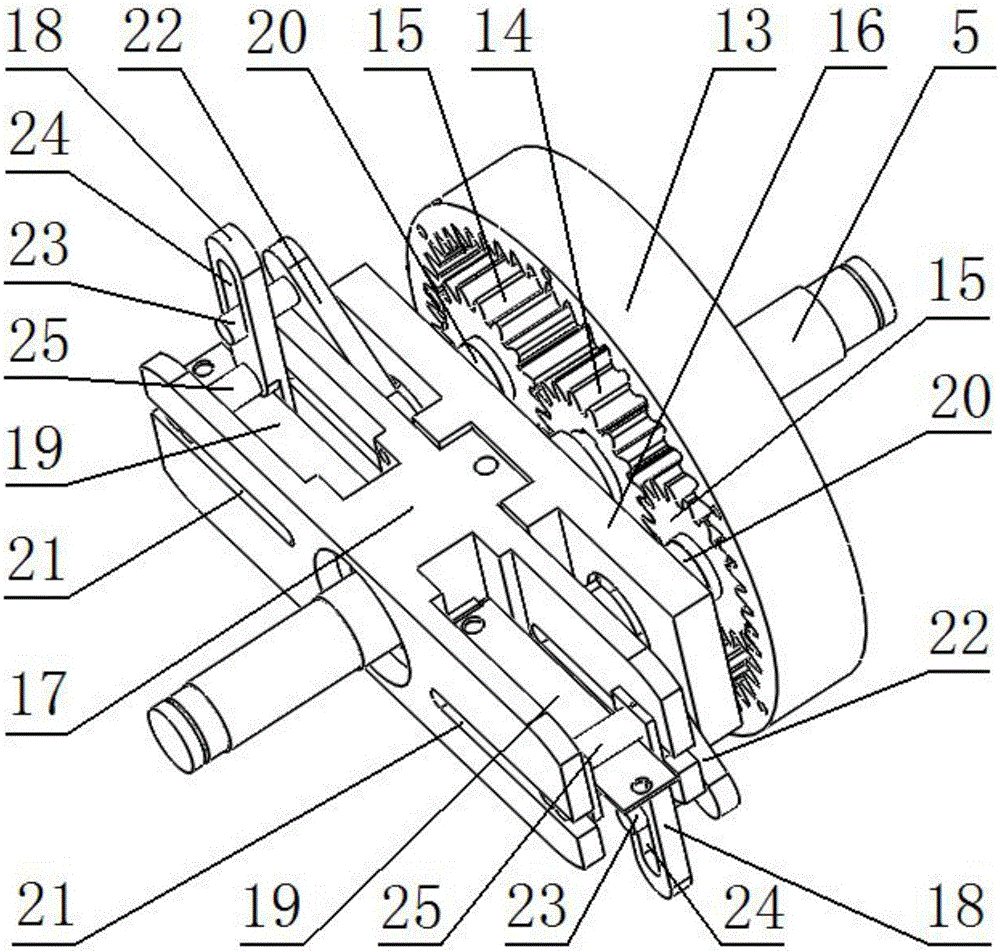
[0039] Let the inner ring gear 13 and the sun gear 14 rotate at the same speed and in the same direction. At this time, the planetary gear 15 only revolves around the sun gear 14 without rotation. Since the planetary gear 15 does not rotate, the variable stiffness actuator does not move, so the...
Embodiment 2
[0040] Embodiment 2: Under the condition that the joint structure of the present invention does not rotate, the stiffness of the joint structure is changed.
[0041] Start the first drive motor 6 and the second drive motor 9 simultaneously, drive the first worm screw 7 to rotate by the first drive motor 6, and then drive the first worm wheel 8 to rotate, drive the sleeve 12 to rotate by the rotation of the first worm wheel 8, and then drive The inner ring gear 13 rotates; the second drive motor 9 drives the second worm 10 to rotate, and then drives the second worm wheel 11 to rotate, and the rotation of the second worm wheel 11 drives the central shaft 5 to rotate, and then drives the sun gear 14 to rotate;
[0042] Make the rotation speed ratio of the ring gear 13 and the sun gear 14 equal to the gear ratio of the sun gear 14 and the ring gear 13, and the ring gear 13 and the sun gear 14 rotate in opposite directions. At this time, the planetary gear 15 only rotates and does n...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More