

Wheel-type robot self-adaptive navigation method based on on-line learning mechanism
A wheeled robot and navigation method technology, applied in the field of adaptive navigation of wheeled robots based on an online learning mechanism, can solve problems such as insufficient robustness of dynamic scenes, inadaptability to dynamic environments, collision risk, and objective accompaniment of collision risk, etc. To achieve the effect of preventing yaw, optimizing the navigation path and reducing the risk of collision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
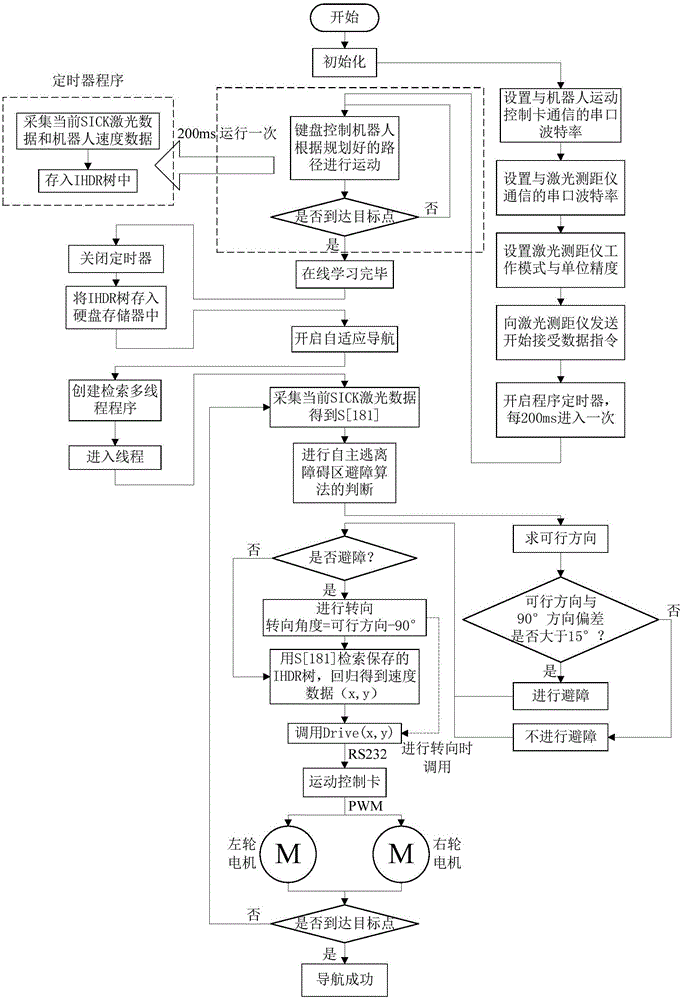
[0030] In order to further illustrate the technical scheme of the present invention, below in conjunction with Figure 1-3 The wheeled robot adaptive navigation method based on the online learning mechanism of the present invention is described in detail.
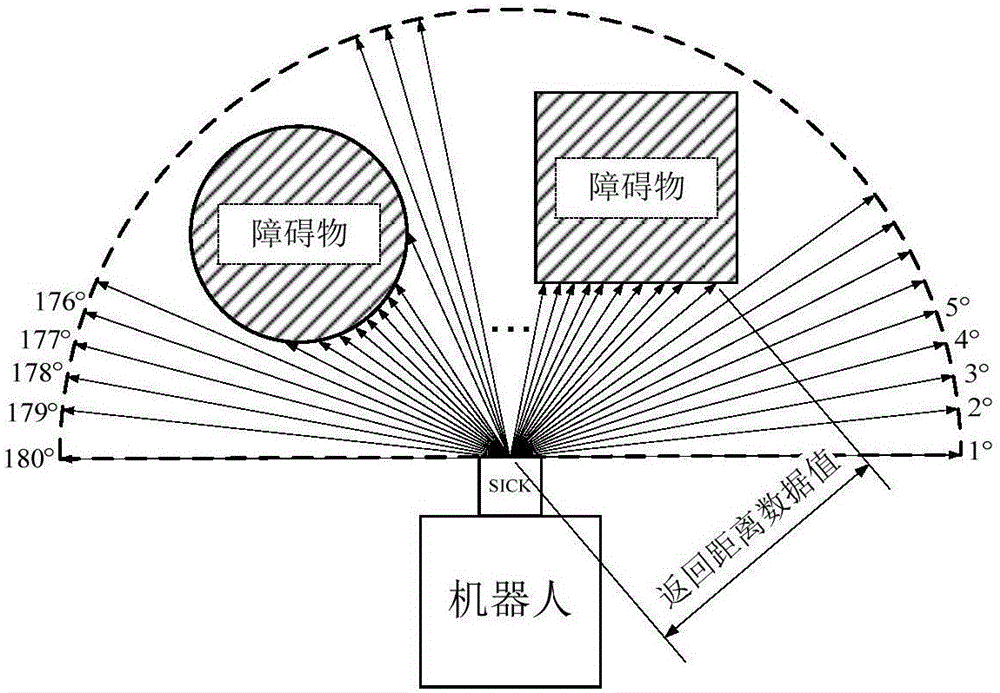
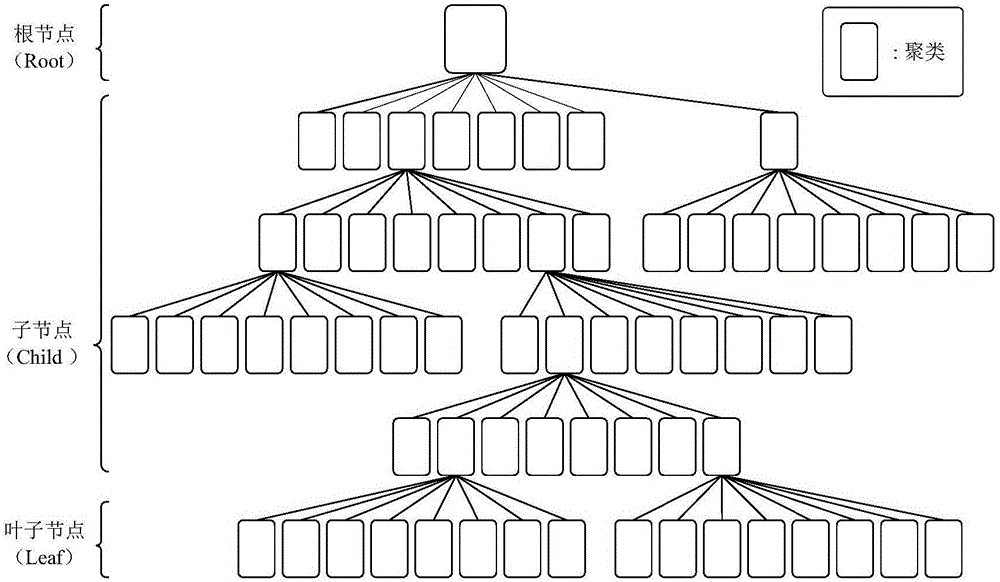
[0031] The present invention uses the SICK laser rangefinder to obtain the distance information of the current environment to perceive the surrounding environment, so that the wheeled robot can learn online according to the planned path, and the learning information is the current SICK laser data (that is, the laser distance data) corresponding to it. The speed data of , together with this mapping relationship, allows two sets of data to be stored in the IHDR tree. When the learning is completed, the IHDR is established at the same time. When the wheeled robot performs adaptive navigation, it collects the current SICK laser data repeatedly, and first puts the data into the obstacle avoidance algorithm for inspection. The ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More