

Mobile robot self-localization method assisted by wireless sensor network
A mobile robot, wireless sensor technology, applied in positioning, radio wave measurement systems, instruments, etc., can solve the problems of difficult to extract environmental features, poor environmental adaptability, and difficult data association, and achieve easy implementation, low difficulty, and avoidance. The effect of environmental feature extraction process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with the accompanying drawings.
[0025] refer to Figure 1 to Figure 6 , a mobile robot self-localization method assisted by a wireless sensor network, said method comprising the following steps:
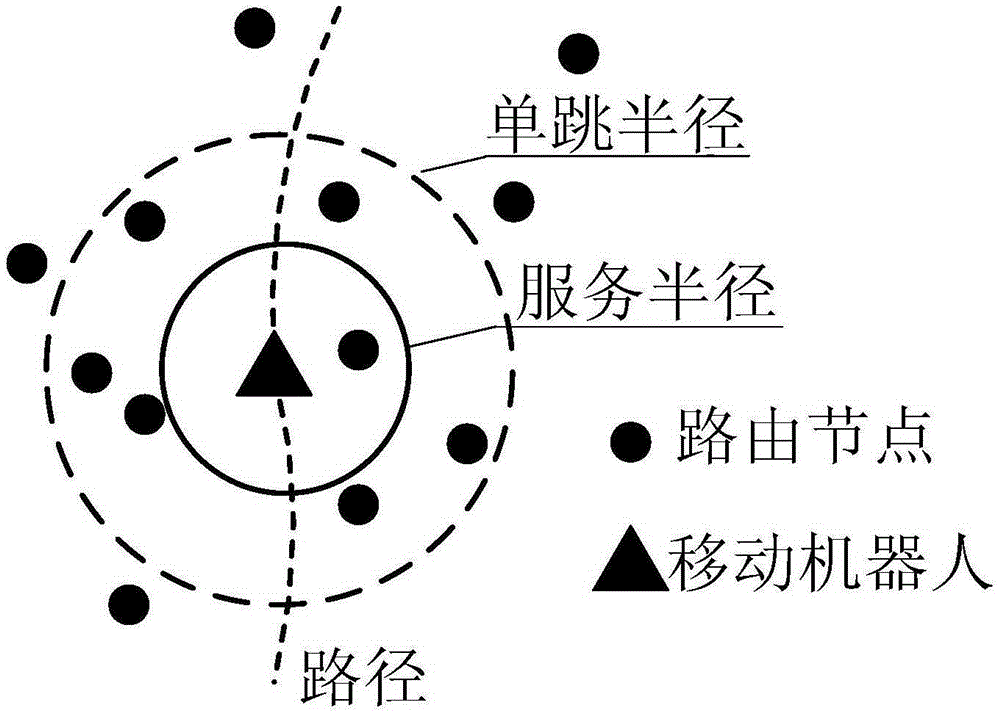
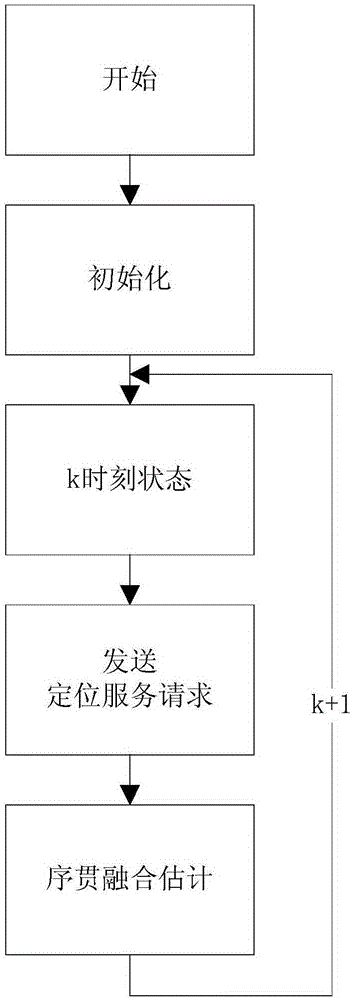
[0026] Step 1) The mobile robot sends a "location request" data packet to the sensor nodes within the single-hop transmission radius;
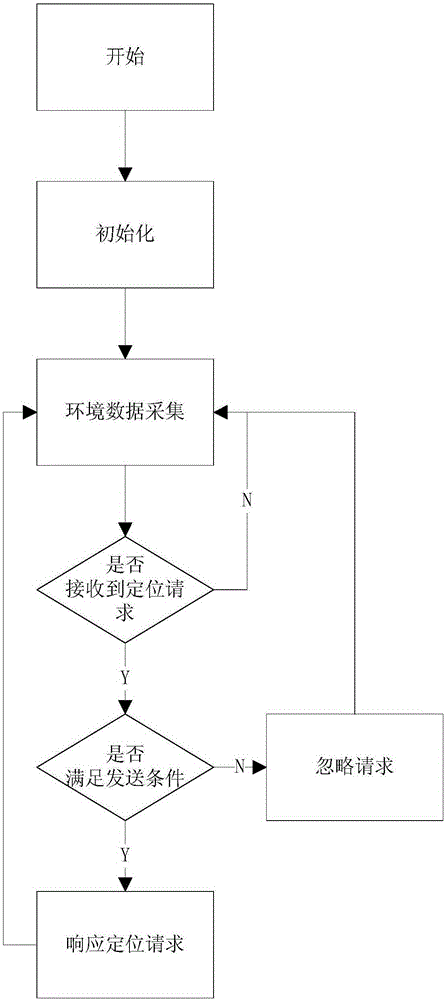
[0027] Step 2) After the wireless sensor network node receives the request, analyze the received data packet, extract the RSSI value of the data packet, and carry out a pre-filtering to the RSSI signal to obtain an estimated value of the RSSI signal;
[0028] Step 3) By the estimated value of the RSSI signal, it is judged whether the sending condition is met, and if the sending condition is met, the response data packet is sent to the mobile robot in a single-hop mode; otherwise, the service request is ignored.
[0029] Step 4) After the mobile robot receives the response...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More