A flexible foot system for a multi-legged robot that can detect contact between feet and the ground
A multi-legged robot and flexible foot technology, applied in the field of robotics, can solve the problems of difficult selection of spring stiffness, low reliability, poor shock absorption performance, etc., and achieve the effect of compact structure, good sensitivity and small volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in further detail below in conjunction with the accompanying drawings.
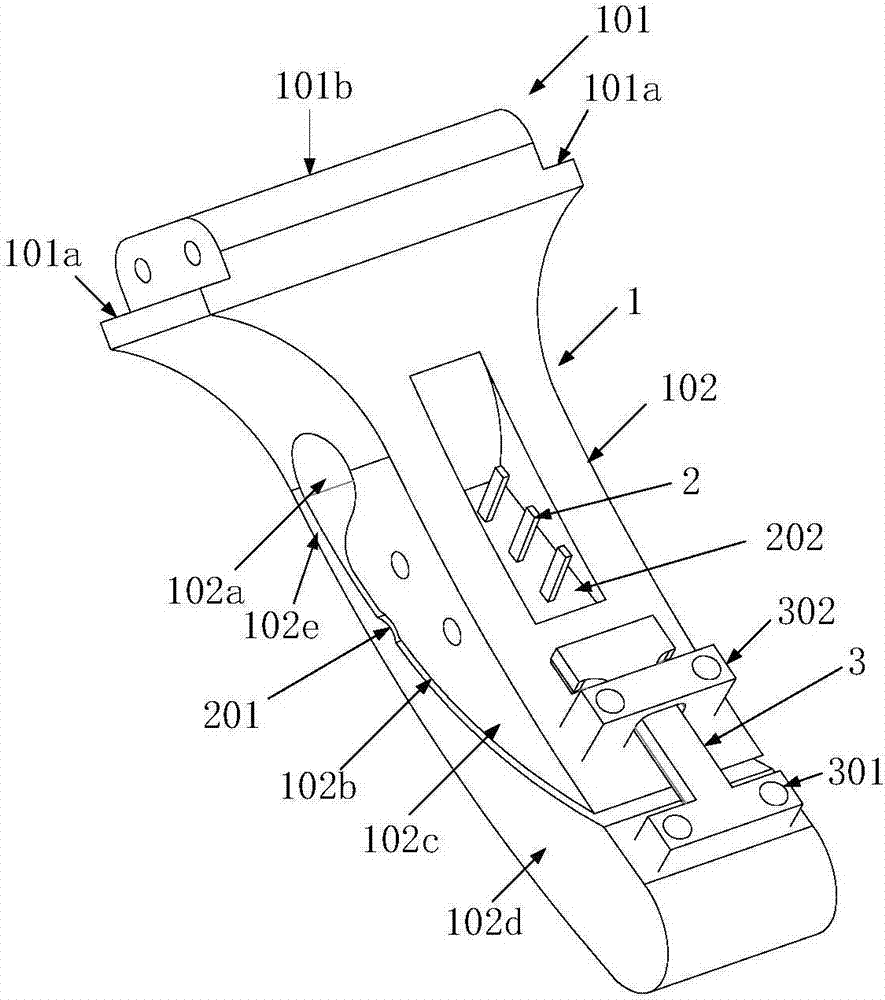
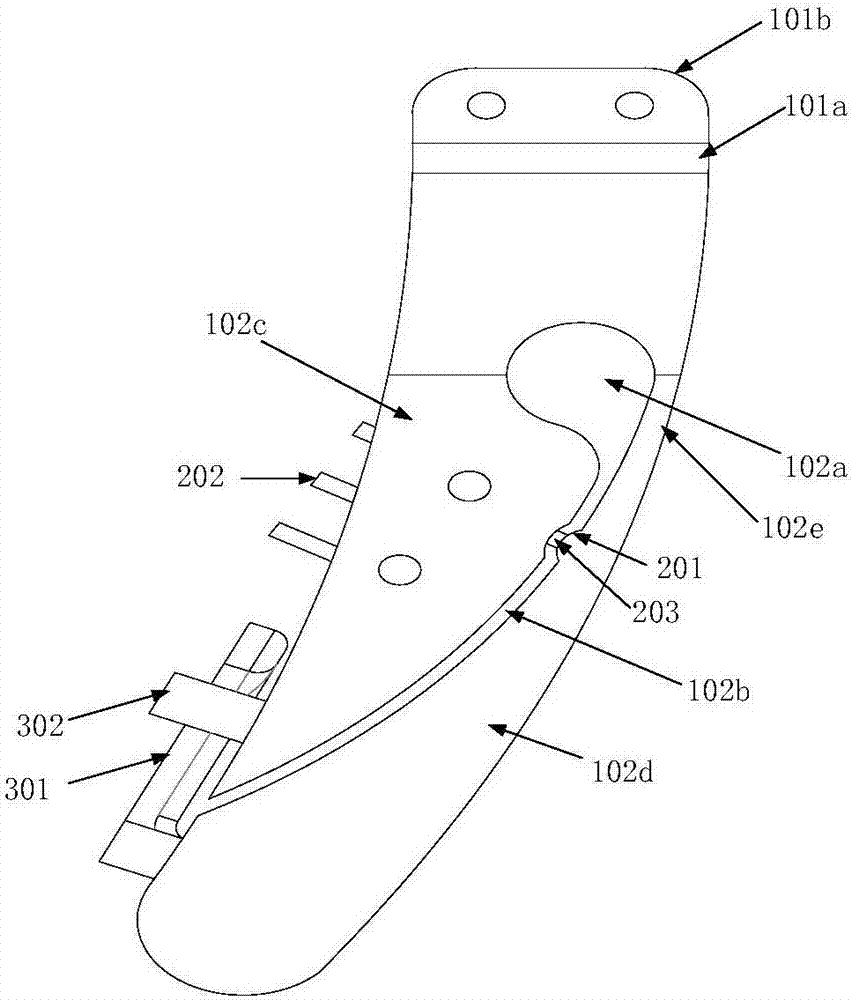
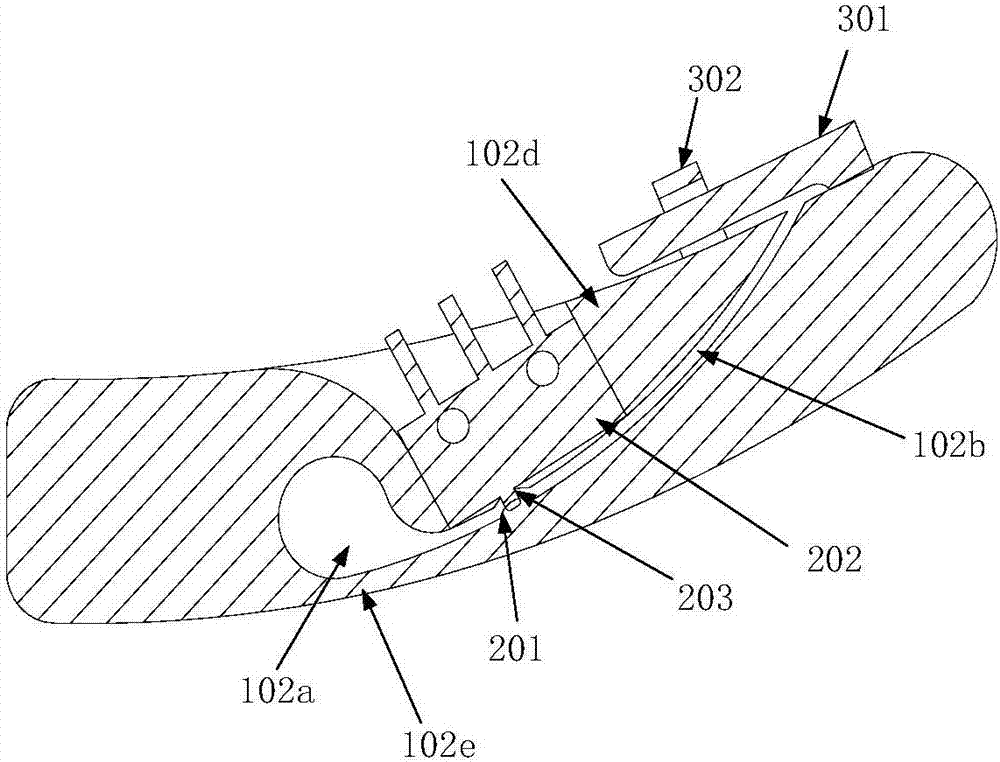
[0022] The multi-legged robot flexible foot system of the present invention includes a flexible foot 1 and a contact detection mechanism 2 and a limit mechanism 3 installed on the flexible foot 1 .
[0023] The flexible foot 1 is integrally formed by 3D printing, including a calf connection part 101 and a flexible joint part 102 . Among them, the lower leg connection part 101 is used to realize the connection between the flexible foot system of the multi-legged robot of the present invention and the robot lower leg, and is suitable for connection with different robot lower legs. The inner side and the outer side of the lower leg connection part 101 have boss positioning surfaces 101a, and the upper end of the middle part has a protruding part 101b, and the protruding part 101b is provided with mounting screw holes along the left and right directions. Thus, w...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com