Quadruped robot based on cell robot units
A quadruped robot and robot technology, applied in the field of intelligent robots, can solve problems such as complex structure, difficult maintenance and support, and small carrying capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The present invention will be described in further detail below in conjunction with the accompanying drawings.
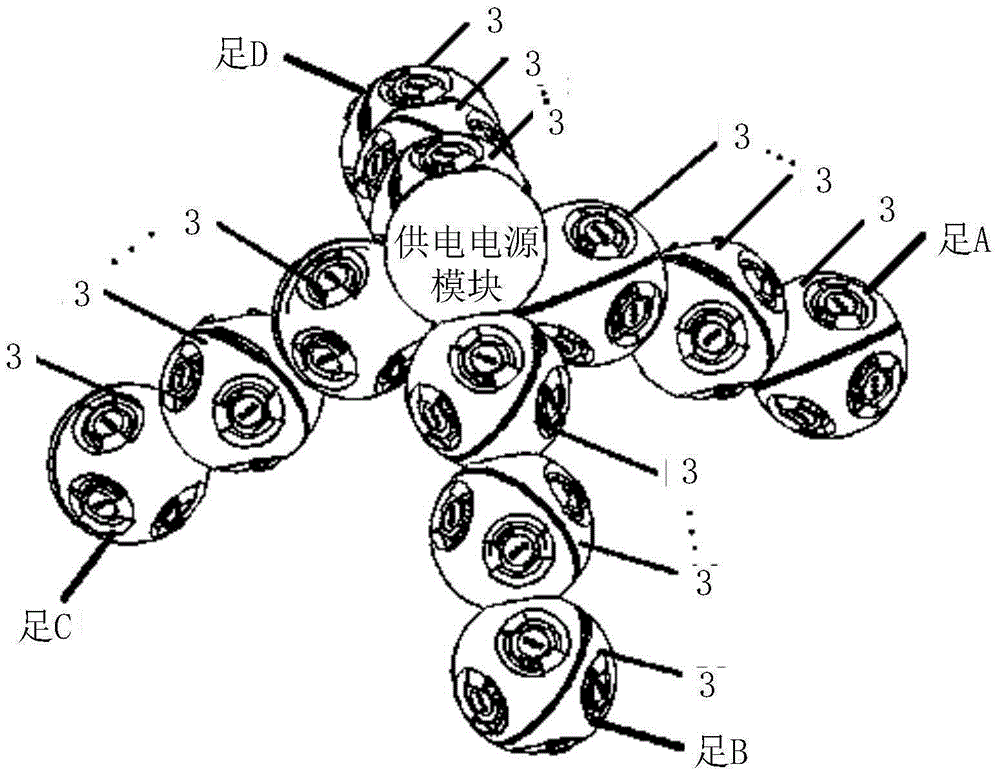
[0039] The present invention is a quadruped robot based on a single cellular robot, including a body 1 and four mechanical feet 2 . Among them, let the four mechanical feet be foot A, foot B, foot C and foot D, all of which are composed of equal numbers of cell robot units 3 connected in pairs, uniformly distributed in the circumferential direction, and fixedly installed on the fuselage 1 . The inside of the fuselage 1 is used to install a power supply.
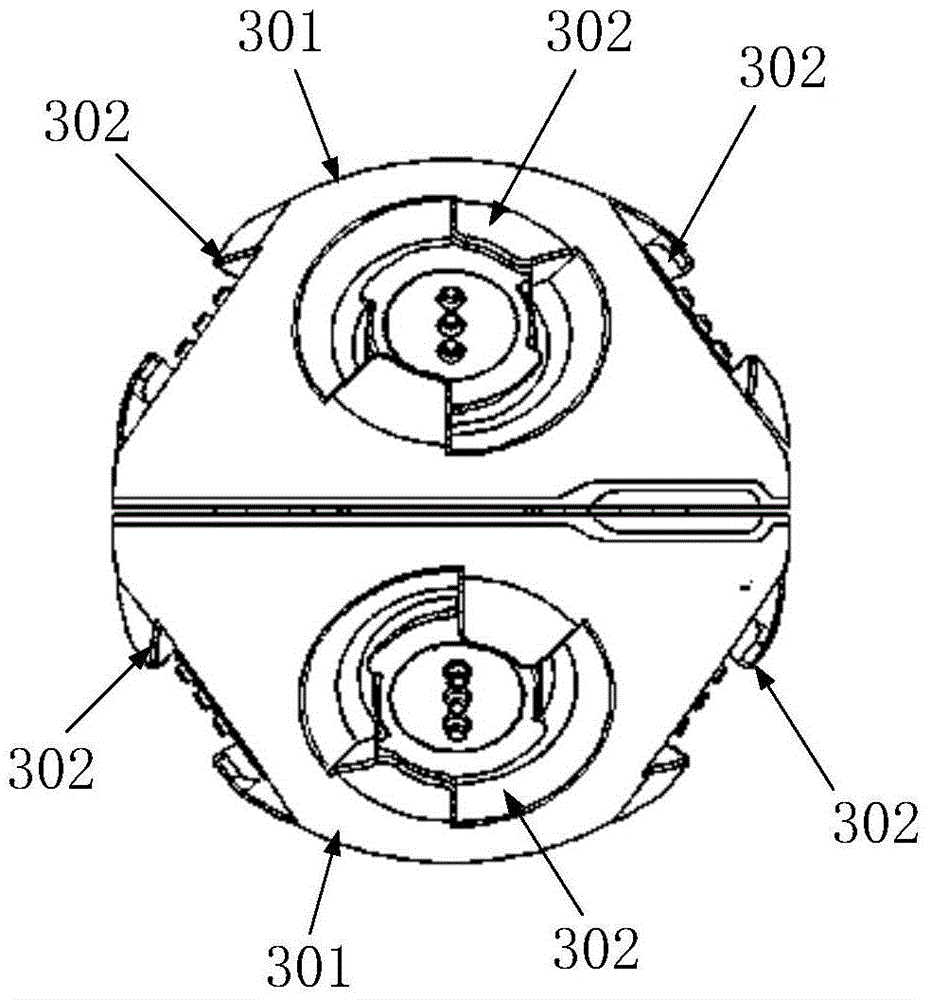
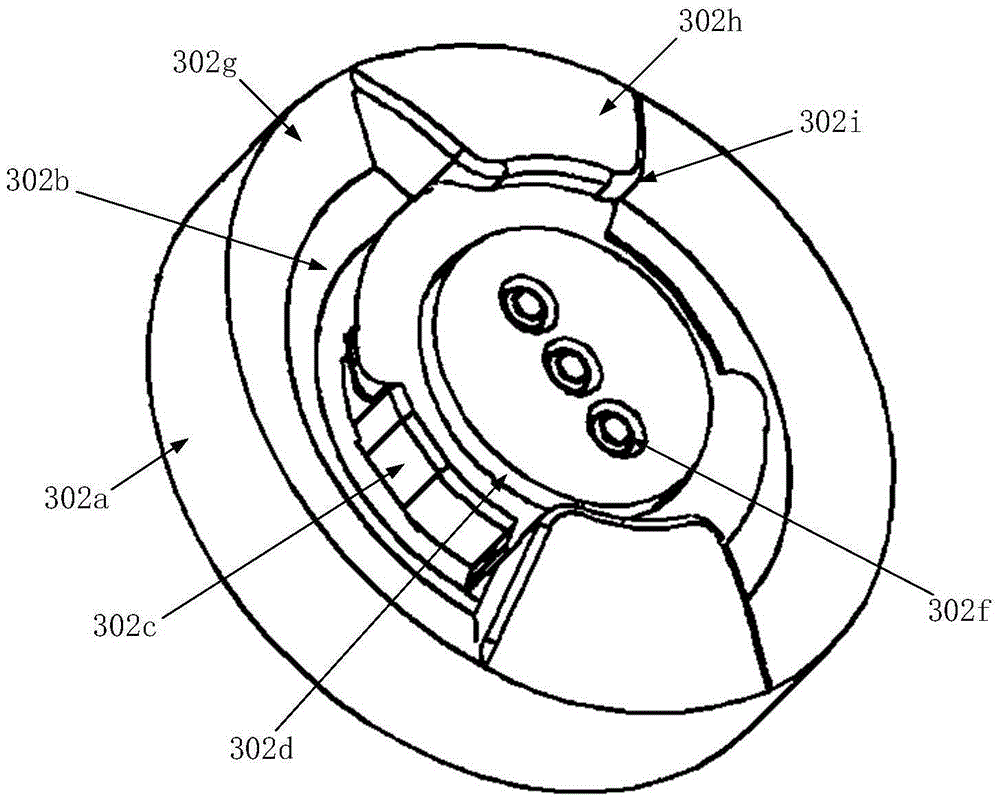
[0040] The cell robot unit 3 is an integral spherical structure composed of two hemispherical shells 301, such as figure 2 As shown, there is a rotational degree of freedom between the two hemispherical shells 301, which are driven to rotate by the drive motor. Three mounting holes are evenly distributed on the wall of each hemispherical shell 301 in the circumferential direction, and a mechanical connect...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com