

Adaptive steering sliding model control method of tracked robot as WSN mobile node
A tracked robot and mobile node technology, applied in the field of robotics, can solve problems such as difficult to meet the precise control of tracked robots
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0083] The adaptive steering sliding mode control method of a crawler robot as a WSN mobile node includes the following steps:
[0084] (1), establish the motion model of the agricultural crawler robot:
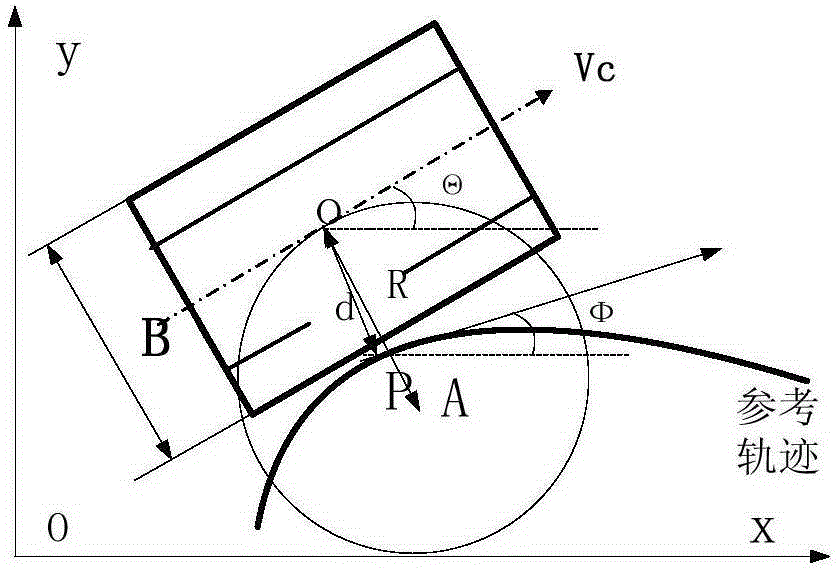
[0085] like figure 1 As shown in the figure, in the agricultural crawler robot, the chassis is composed of the car body, two driving wheels, four road wheels, and two inducers, and the mobile platform is composed of the chassis and two tracks. Two DC servo motors drive the two tracks respectively. Adjust the positional relationship between the speed of the robot and the tracking trajectory by adjusting the input voltage of the servo motor;
[0086] Let B be the distance between the two driving wheels, θ is the angle between the robot's motion direction and the positive x-axis, point P is the intersection of the line connecting the robot center O and the turning arc's center A and the reference trajectory, and d is the robot's geometric center O The distance from point P, φ ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More