

A rope-tracted parallel translational micro-motion platform
A motion platform and rope traction technology, applied in the field of machinery, can solve the problems of affecting positioning accuracy, large branch chain size, and difficult processing, etc., and achieve the effects of good motion stability, simple structure, and fast motion response speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
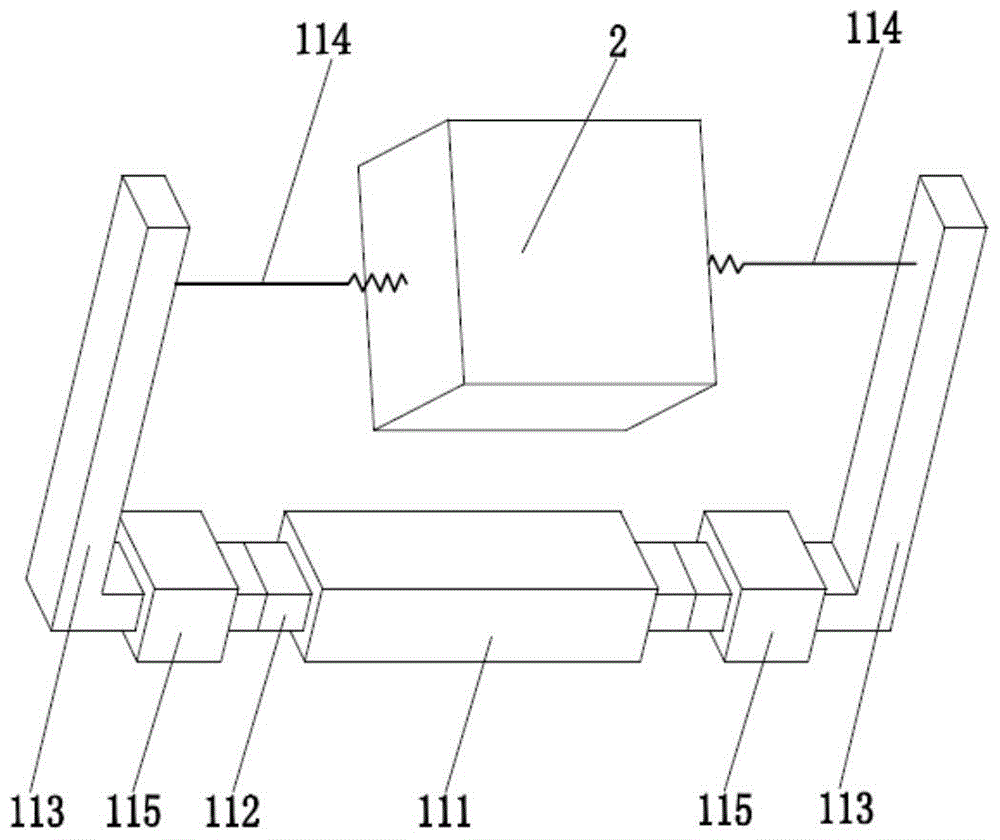
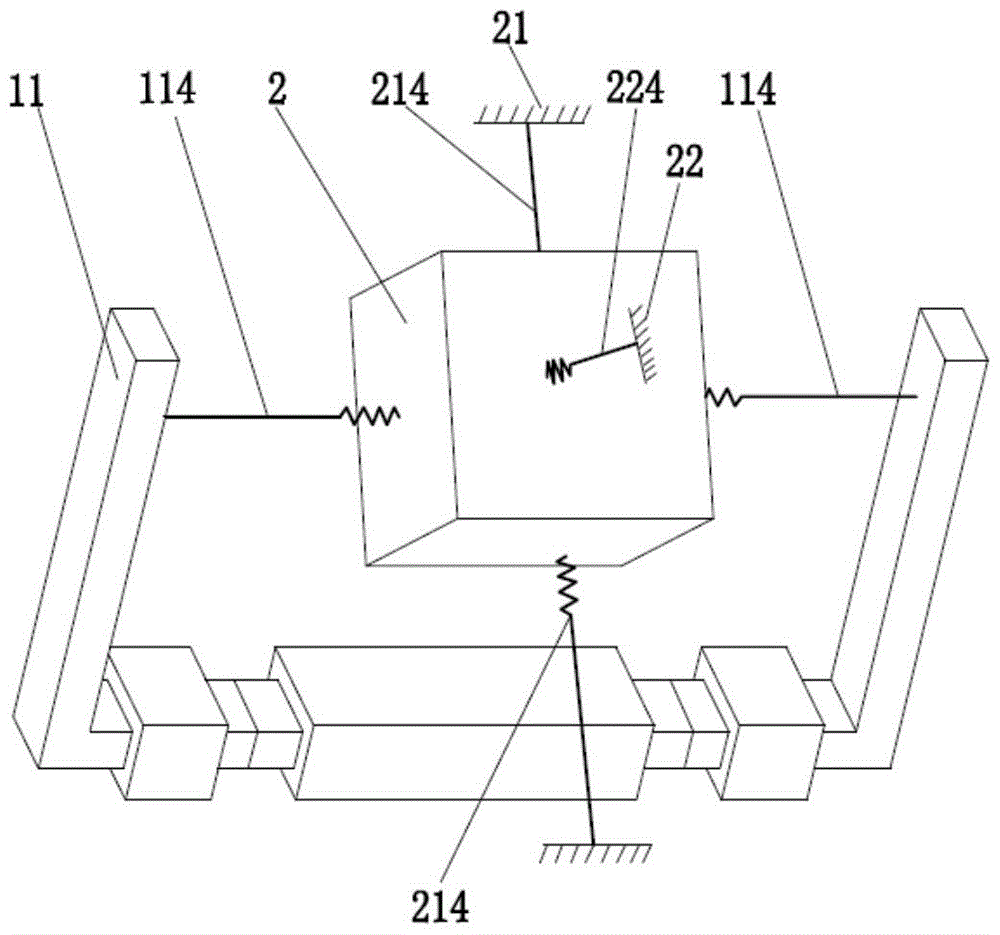
[0032] For the case of single-degree-of-freedom translation of the micro-motion platform, the structure is as follows figure 2 As shown, it includes active branch chain I11, passive branch chain I21 and passive branch chain II22, motion platform 2, active rope group I114, passive rope group I214 and passive rope group II224. If the motion platform 2 moves in translation along the X direction, it is necessary to install an active branch chain I11 in the X direction, and at the same time install a passive branch chain I21 and a passive branch chain II22 in the Y and Z directions respectively. During installation, the movement direction of the support 113 in the active branch chain I11 is consistent with the movement direction (X direction) of the motion platform 2, and one end of the four groups of passive rope groups I214 and passive rope group II224 in the passive branch chain I21 and the passive branch chain II22 are connected to the The motion platform 2 is connected, and t...
Embodiment 2
[0035] For the case of two-degree-of-freedom plane translation of the micro-motion platform, the structure is as follows image 3As shown, it includes active branch chain I11, active branch chain II12, passive branch chain I21, motion platform 2, active rope group I114, active rope group II124, and passive rope group I214. If the motion platform 2 moves in translation in the XY plane, the two directions perpendicular to each other in the plane are set as the X and Y directions, and it is necessary to install an active branch chain I11 and an active branch chain II12 in the X and Y directions respectively, and at the same time in the Z direction A passive branch chain I21 is installed on it. When the active branch chain I11, the active branch chain II12 and the passive branch chain I21 are installed, they must be perpendicular to each other and prevent movement interference. One end of two groups of passive ropes in the passive branch chain is connected with the motion platfor...
Embodiment 3
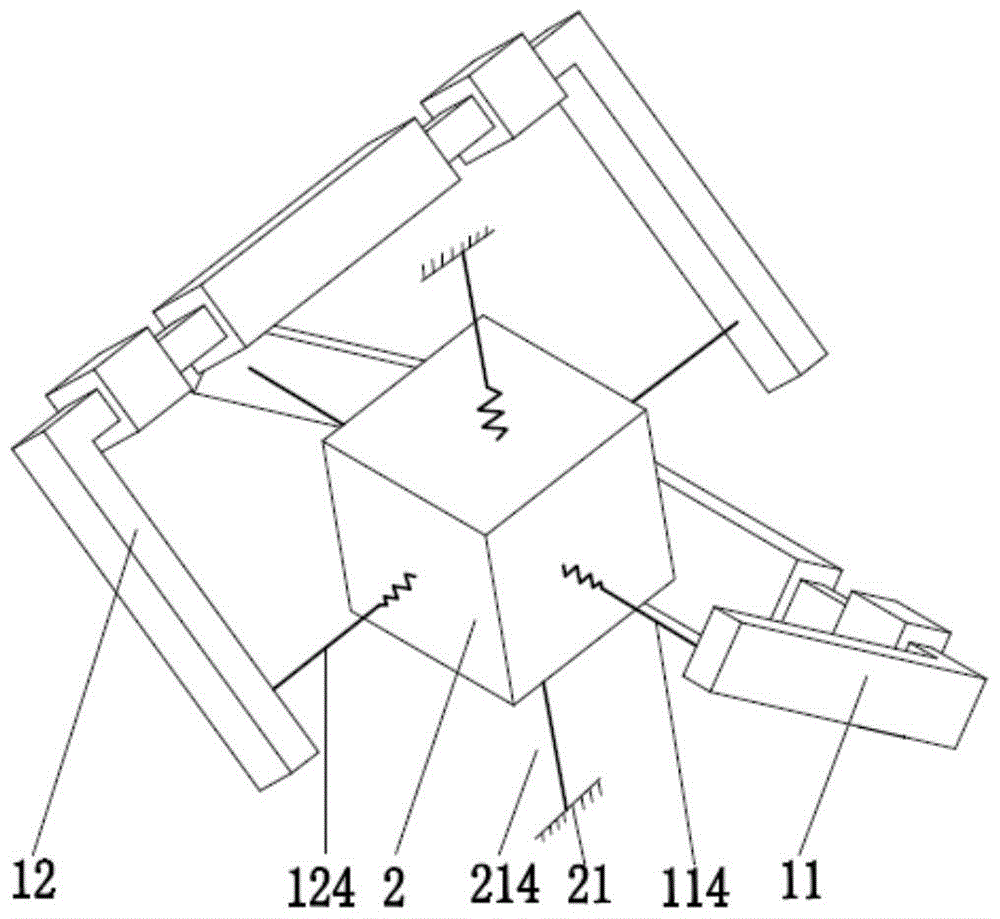
[0038] For the case of three-degree-of-freedom space translation of the micro-motion platform, the structure is as follows Figure 4 As shown, it includes active branch chain I11, active branch chain II12, active branch chain III13, motion platform 2, active rope group I114, active rope group II124, and active rope group III134. The motion platform 2 moves in translation in the space, and the three mutually perpendicular directions in the space are respectively set as X, Y and Z directions. It is necessary to install an active branch chain I11, an active branch chain II12, and an active branch chain in the X, Y, and Z directions respectively. Branched chain III13. The structural forms of the three active branch chains 11, 12, 13 are the same, and it is necessary to ensure that the movement directions of the three active branch chains 11, 12, 13 are perpendicular to each other during installation. When the motion platform 2 moves slightly in space, the active rope groups 114, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More