

Method and robot for performing fire source location and fire extinguishment based on binocular vision
A binocular vision and robotics technology, applied in instruments, image data processing, computing, etc., can solve problems such as untimely fire and inadequate supervision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
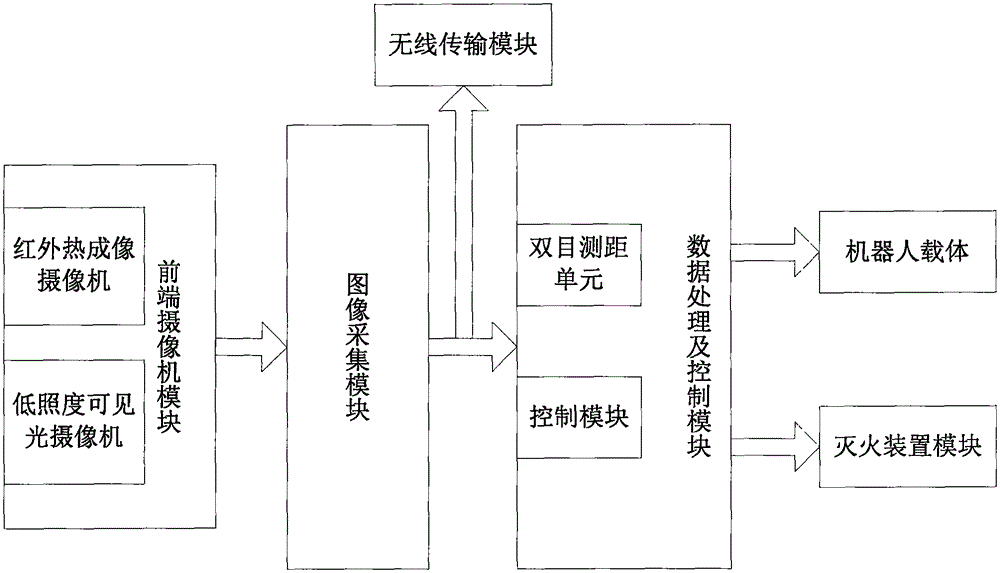
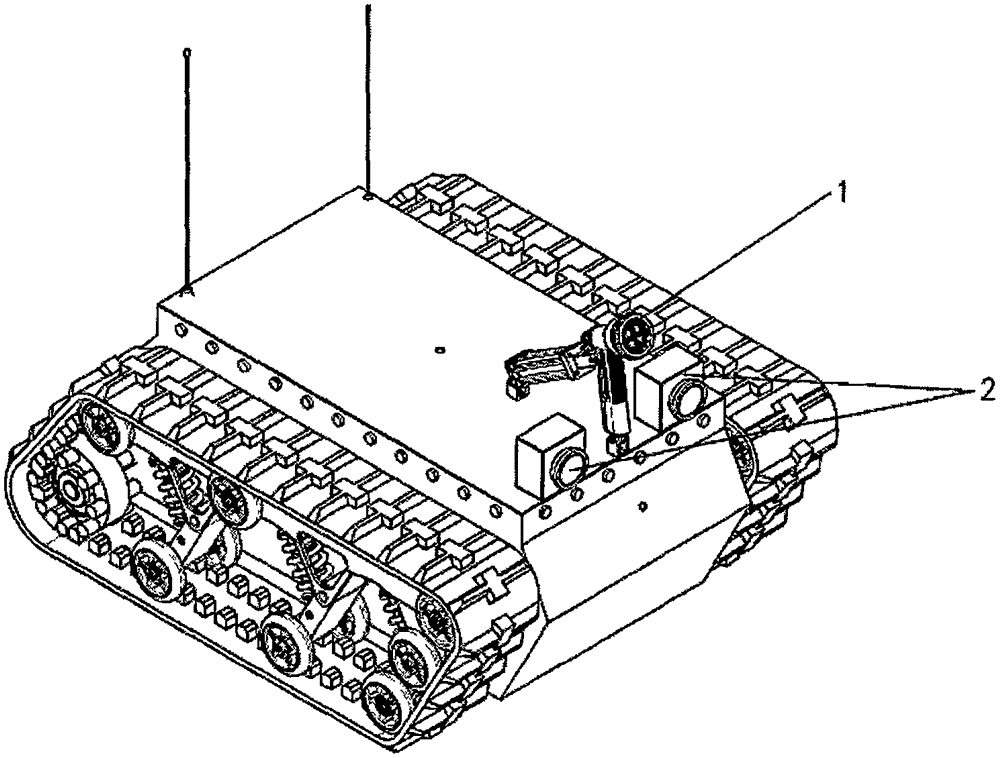
[0027] see figure 1 and figure 2 , the present invention is based on the binocular vision of the fire source location and fire fighting robot, including:
[0028] The front-end camera module 2 is composed of an infrared thermal imager and a low-illuminance visible light camera. The infrared thermal imager and the low-illuminance visible light camera are arranged horizontally on the left and right with a distance of 4-8cm. The front-end camera module 2 is connected to the image acquisition module;
[0029] Image acquisition module. The image acquisition module is an image acquisition and processing board composed of DSP+FPGA. After the image acquisition module collects infrared thermal imaging images and visible light images, it first analyzes the infrared thermal imaging images to determine whether there is an abnormal temperature and is consistent with the fire source. If an area with abnormal temperature and fire source characteristics is found, the infrared thermal imagin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More