

Robot laser scanning welding seam tracking system calibration method
A tracking system, laser scanning technology, applied in the direction of instruments, image data processing, computing, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
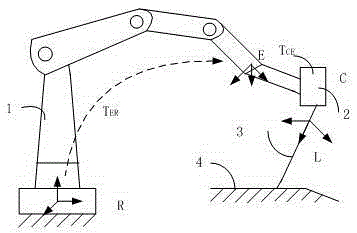
[0015] (1) Robot laser seam tracking system such as figure 1 as shown,
[0016] The robot laser scanning seam tracking system is mainly composed of a six-degree-of-freedom robot and a laser scanning seam tracking sensor, including a robot 1, a laser seam tracking sensor 2, a linear structured light 3 and a weld surface 4. The coordinate systems involved in this system are as follows:
[0017] In the figure, {R} is the basic coordinate system fixed to the robot base; {E} is the end coordinate system of the manipulator; {C} is the camera coordinate system.
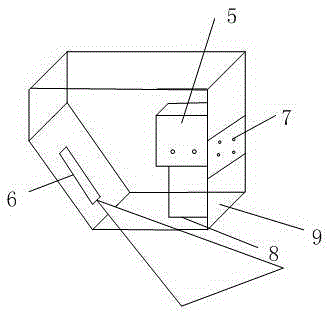
[0018] (2) The hardware structure and working principle of the sensor
[0019] Such as figure 2 As shown, the laser scanning seam tracking sensor is composed of a laser 6, a filter 8, an industrial camera 5, a connector 7 and a splash guard 9 and the like. There is a hole on the top of ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More