

Inertia and mileometer combination high-precision attitude measurement method
A measurement method, odometer technology, applied in the field of navigation, can solve problems such as error accumulation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0100] The technical solution of the present invention will be further described in detail below in combination with specific embodiments.
[0101] An inertial odometer combined high-precision attitude measurement method, comprising the following steps:
[0102] (1) Determine the state variable of the Kalman filter state equation
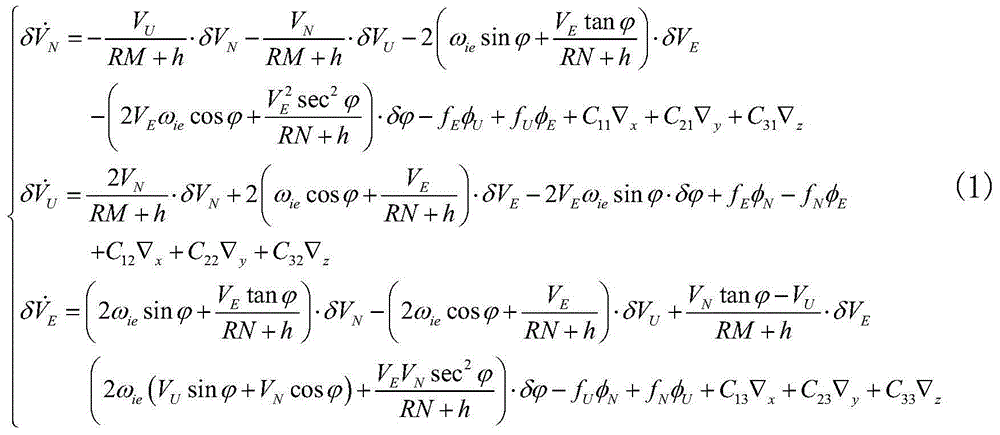
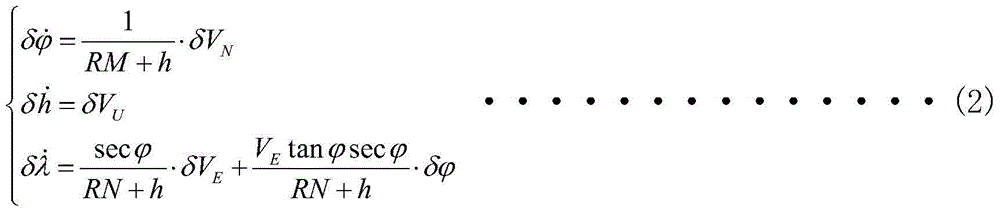
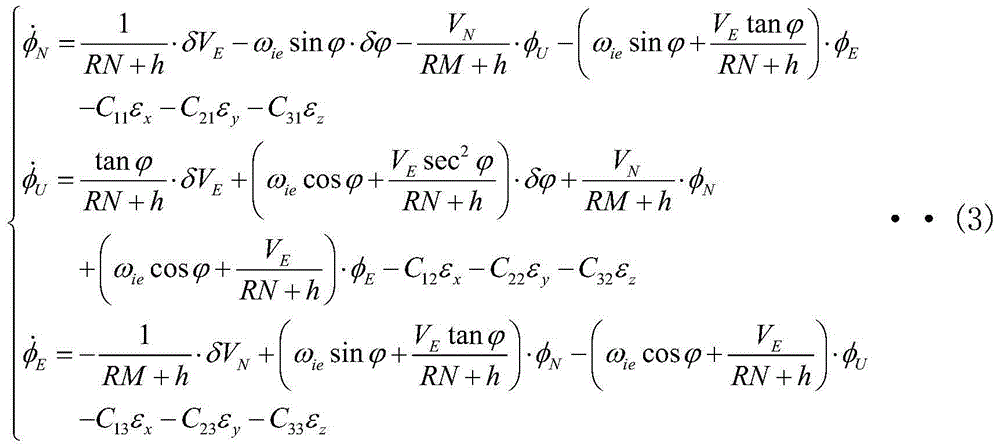
[0103] The state equation of the Kalman filter takes 19 state variables, which are: north direction velocity error δV N , Azimuth velocity error δV U , East speed error δV E , latitude error Height error δh, longitude error δλ, north misalignment angle φ N , celestial misalignment angle φ U , East misalignment angle φ E , X gyro driftε x , Y gyro driftε y , Z gyro drift ε z , X plus table zero offset Y plus table zero offset Z plus table zero offset dead reckoning latitude error Dead reckoning altitude error δh D , dead reckoning longitude error δλ D , Odometer scale coefficient error δK D ;
[0104] (2) Determine the error equ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More