

Unmanned aerial vehicle motion target tracking and positioning method under geographic information space-time constraint
A geographic information and moving target technology, applied in the field of UAV moving target tracking and positioning, can solve problems such as difficult to meet real-time positioning, difficult moving target tracking, and inability to obtain high-precision geographic coordinates of the target, so as to achieve high-precision positioning of the target , Improve tracking accuracy and reliability, improve tracking reliability and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be described in detail below in conjunction with the drawings and specific embodiments.
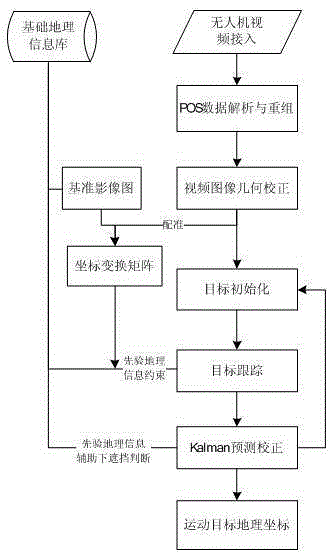
[0037] Step 1: Analysis and reorganization of UAV POS (Position and Orientation System, positioning and orientation system) data.
[0038] This step is to obtain the outer azimuth element and the outer azimuth line element of the aerial photo according to the attitude angle and the geometric center position of the IMU in the POS data. The implementation process of this step is a prior art.
[0039] The inertial measurement unit (IMU) can obtain the attitude angle of the UAV. It usually uses the HPR (heading, pitch, roll) system. The heading, pitch, and roll refer to the yaw angle, pitch angle, and roll angle, respectively. In the field of photogrammetry, the OPK system is generally used to represent the outer azimuth elements of aerial photographs. Therefore, it is necessary to convert the attitude angle (Φ, Θ, Ψ) measured by t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More