

Prosthesis mechanical arm, robot and robot control method
A robotic arm and robot technology, applied in manipulators, program-controlled manipulators, prostheses, etc., can solve the problems of insufficient strength of manipulators, inability to do housework, and high cost of manipulator joints
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
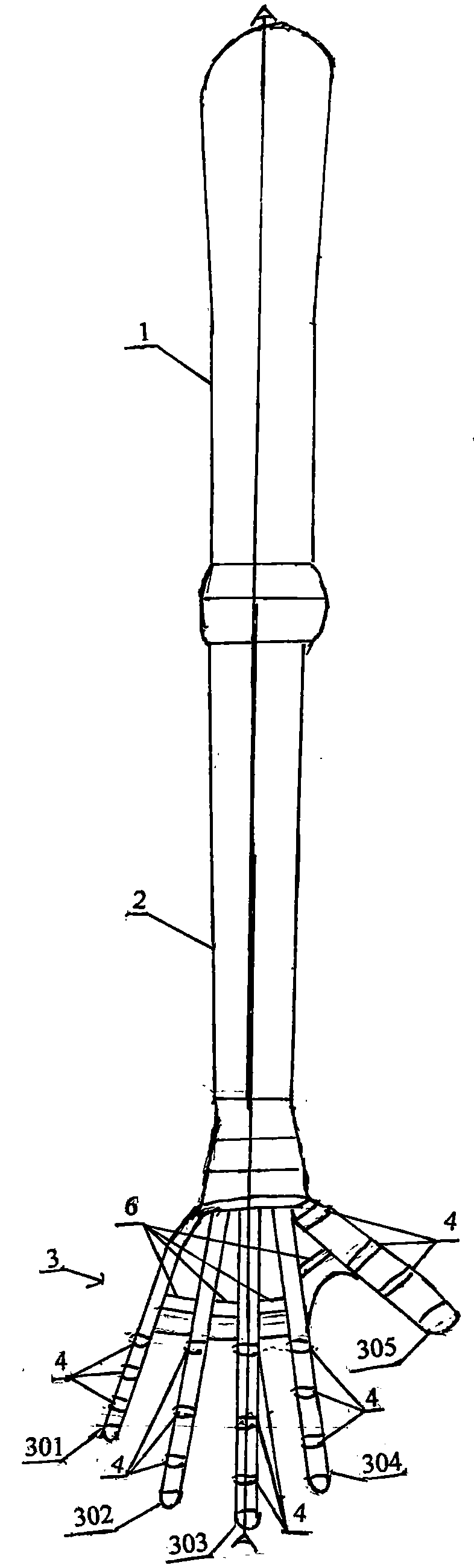
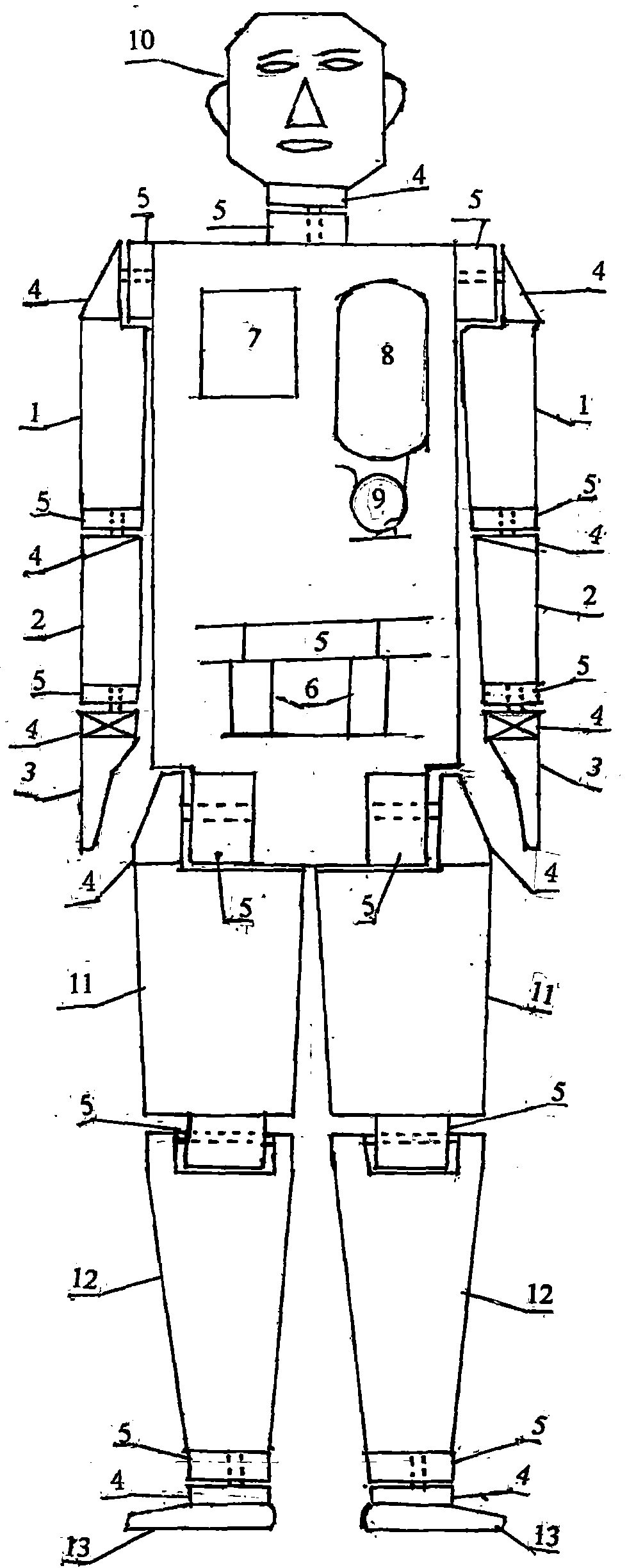
[0018] figure 1 , figure 2 , image 3 , Figure 4 and Figure 5As shown, the prosthetic mechanical arm of the present invention is made up of upper arm 1, lower arm 2, hand 3, their skeletons are made of plastics, and the surface of the plastic shell is covered with a layer of rubber film. The upper end of the upper arm 1 is provided with a bladder joint, an elbow joint is provided between the upper arm 1 and the lower arm 2, and a wrist joint is provided between the lower arm 2 and the palm. The structure of the hand 3 is as follows: an arc groove, the arc center of the arc groove is downward, and the notch is forward, the middle finger 303 extending to the palm is fixed in the middle of the arc groove, the extension of the ring finger 302 and the little finger 301 The bones in the palm are hinged next to the extended bone of the middle finger 303 in the arc-shaped groove, the bone hinge in the palm extended by the index finger 304 is on the other side of the extended bo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More