

Four-freedom-degree parallel sorting robot driven by rotation pairs
A technology of rotating pair and robot, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of large working space, slow response speed, high price, etc., to achieve convenient installation and maintenance, small cumulative motion error, and structural compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
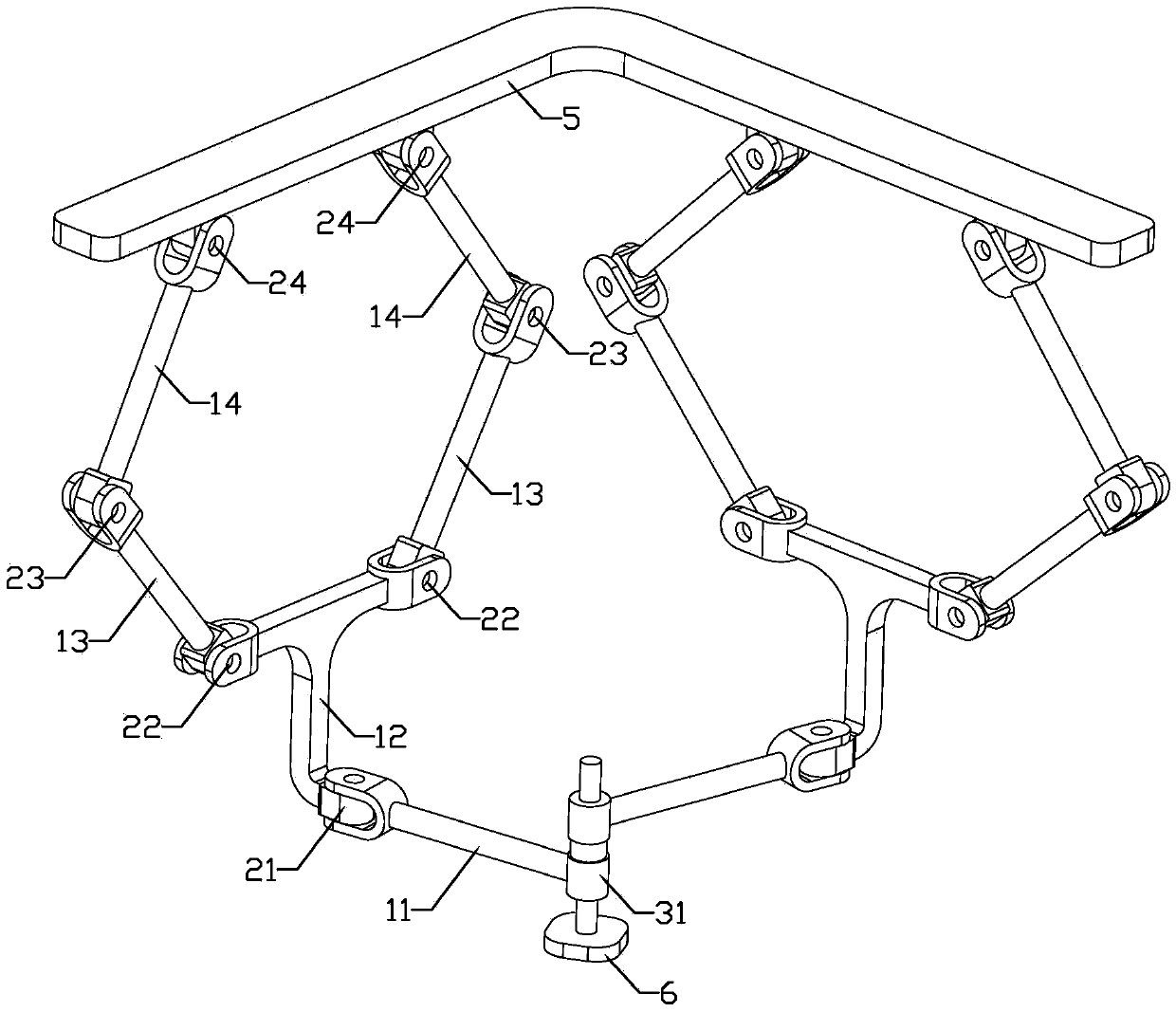
[0017] Such as figure 1 A four-degree-of-freedom parallel sorting robot driven by a rotating pair is shown, including a base 5, an end effector 6, and two branch mechanisms. The end effector is equipped with equipment for gripping parts.
[0018] The two branches are used to drive the movement of the end effector, and are connected in parallel between the end effector and the base; each branch has five degrees of freedom, including sequentially connected between the end effector and the base Between the screw pair 31, the first connecting rod 11, the first rotating pair 21, the second connecting rod 12 and the two sub-branches in parallel; it can be seen in the figure that the screw pairs in the two branches are coaxial.
[0019] Each of the sub-branches includes a second rotating pair 22 , a third connecting rod 13 , a third rotating pair 23 , a fourth connecting rod 14 , and a fourth rotating pair 24 sequentially connected between the second connecting rod and the base.
...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More