Hand-eye coordination control system and method of split minimally invasive surgical robot
A minimally invasive surgery, hand-eye coordination technology, applied in surgical robots and other directions, can solve problems such as inconsistent hand-eye coordination, and achieve the effect of overcoming inconsistent hand-eye movements and realizing intuitive control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
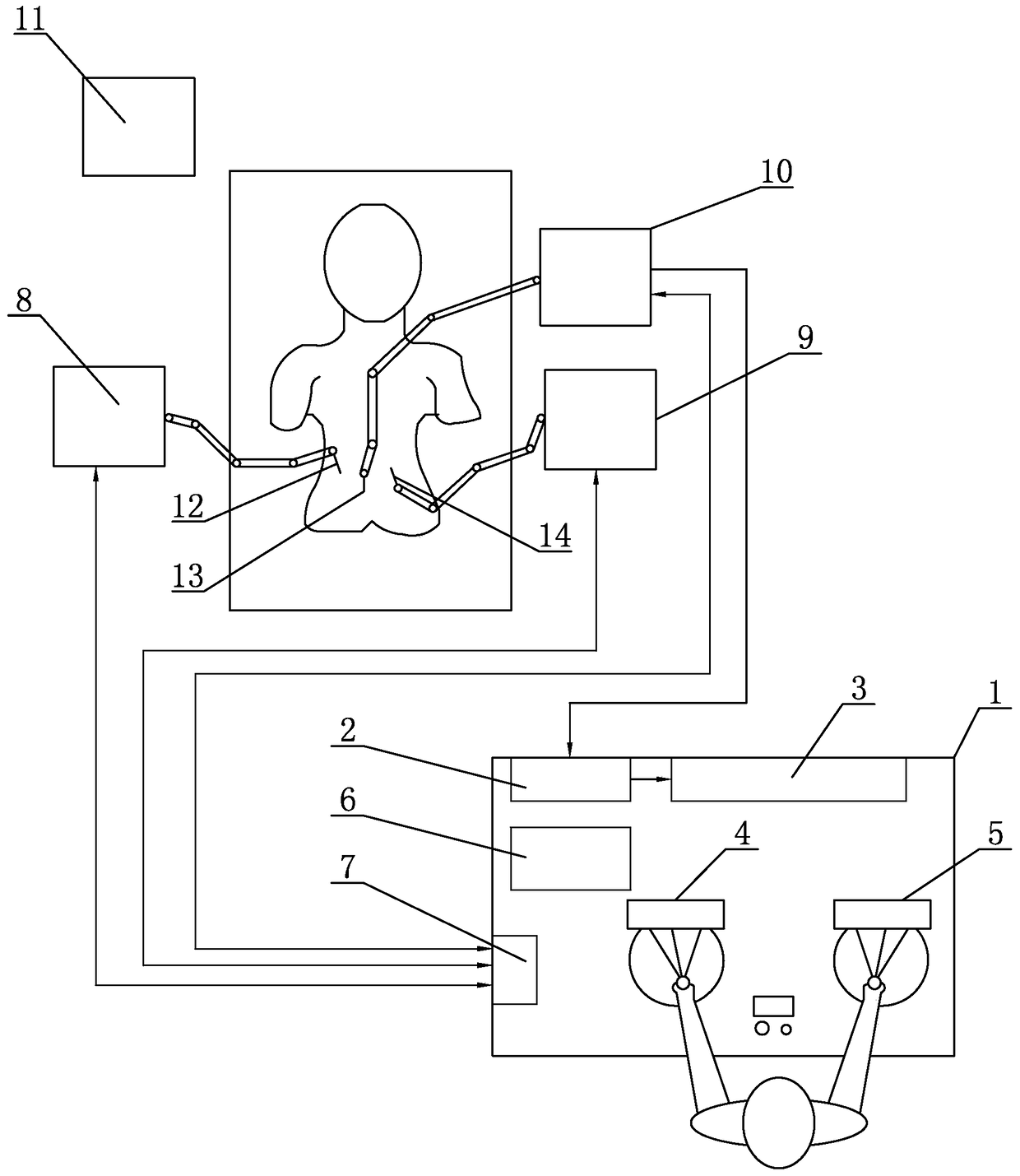
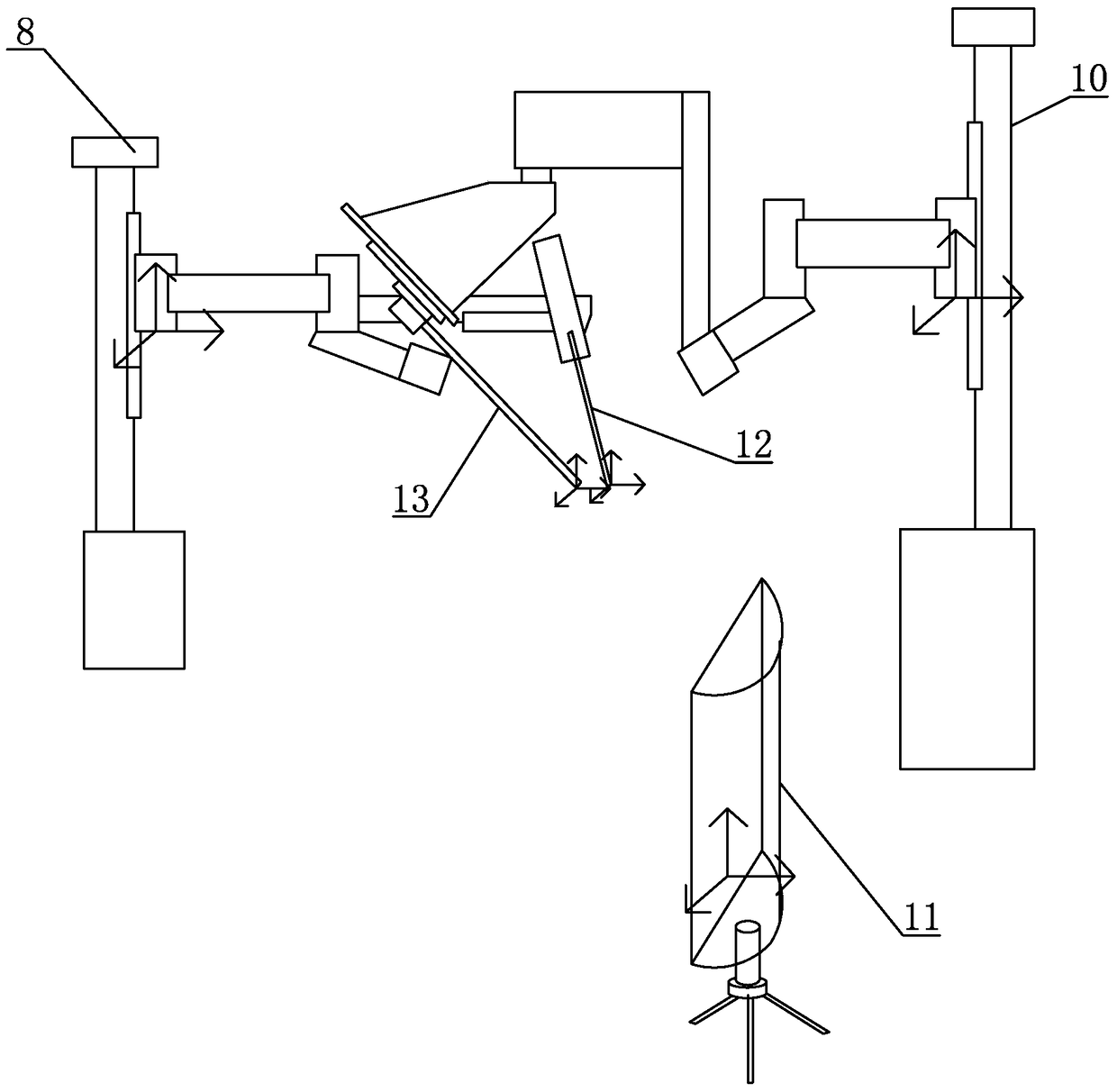
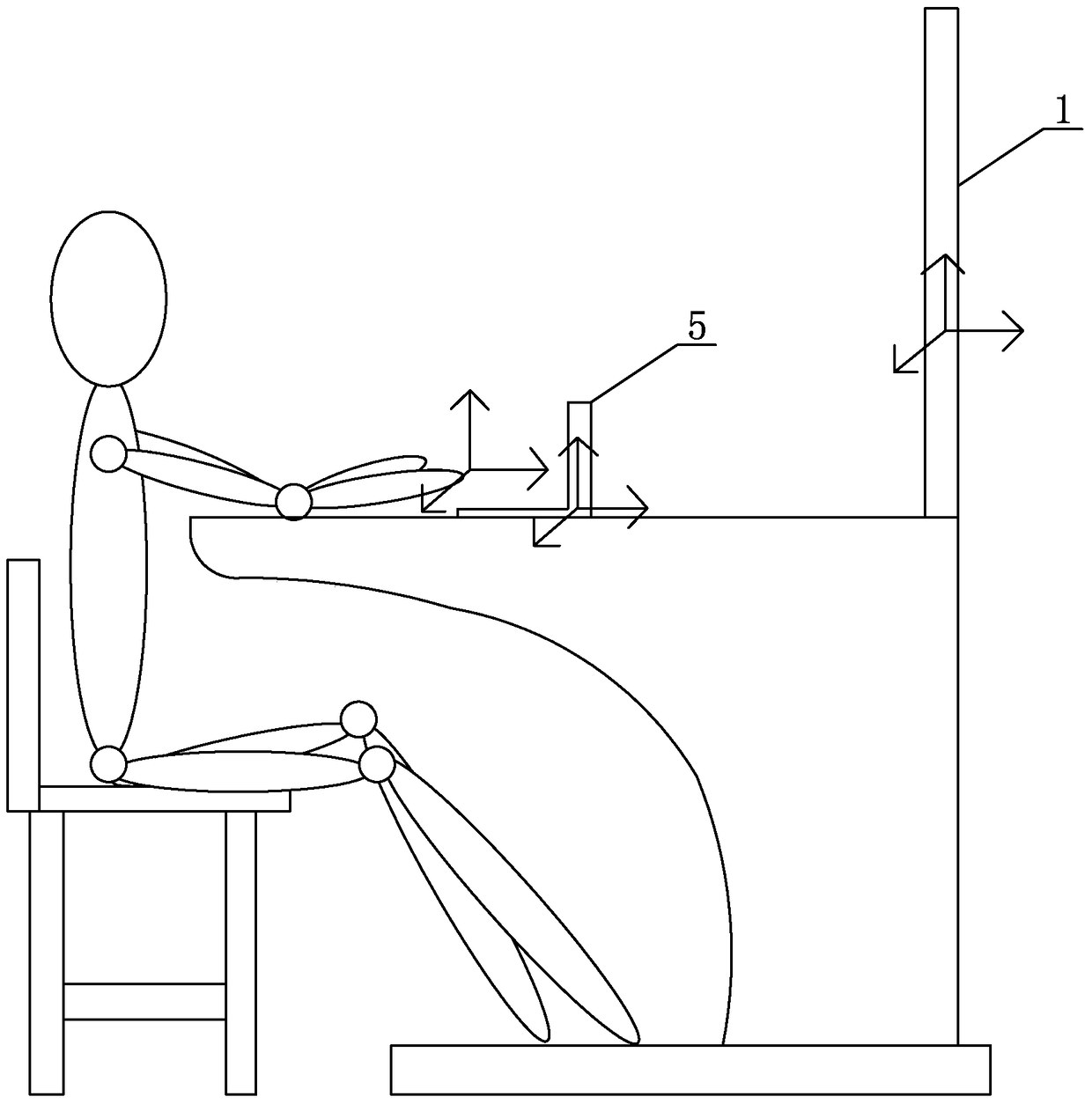
[0017] Specific implementation mode one: combine figure 1 Speaking to image 3 According to this embodiment, the hand-eye coordination control system of the split type minimally invasive surgical robot described in this embodiment includes a main console 1, a first arm 8, a second arm 9, a mirror arm 10, a first surgical instrument 12. Laparoscope 13 and second surgical instrument 14. Main console 1 is provided with 3D display system 2, 3D display 3, first main operator 4, second main operator 5, industrial computer 6 and industrial router 7, The laparoscope 13 is installed on the mirror-holding end of the mirror-holding arm 10, the image signal receiving end of the 3D display system 2 is connected through the image signal transmitting end of the laparoscope 13, and the 3D display system 2 transmits the image information to the 3D display 3 for display. The first surgical instrument 12 is connected to the slave arm end of the first manipulator arm 18, the second surgical inst...
specific Embodiment approach 2
[0018] Specific implementation mode two: combination Figure 1 to Figure 3 To illustrate this embodiment, the hand-eye coordination control system of the split-type minimally invasive surgical robot in this embodiment further includes a pose tracking and measurement system 11, which is arranged above the patient's surgical site. Other components and connections are the same as those in the first embodiment.
specific Embodiment approach 3
[0019] Specific implementation mode three: combination Figure 1 to Figure 3 Describe this embodiment, the hand-eye coordination control method of the split type minimally invasive surgical robot described in this embodiment is realized through the following steps:
[0020] Step 1. Establish the main hand kinematics model: obtain the relationship between the main hand end coordinate system and the main hand base coordinate system through the main operator's forward kinematics calculation;
[0021] Step 2, using the actual measurement results to obtain the transformation matrix A of the main hand base coordinate system relative to the display coordinate system, and then obtain the transformation matrix B of the main hand end coordinate system relative to the display coordinate system;
[0022] Step 3: Map the transformation matrix B obtained in step 2 to the slave arm end of the mechanical arm to obtain the transformation matrix C of the end coordinate system of the surgical in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More