A control method for an AGV trolley
A control method and trolley technology, which are applied to conveyor control devices, conveyors, conveyor objects, etc., can solve problems such as inconvenient control and low efficiency of AGV systems, and achieve industrial automation and reduce the labor intensity of employees.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings.
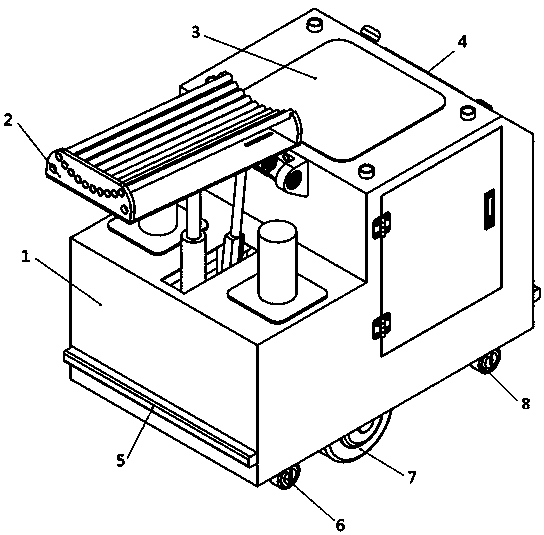
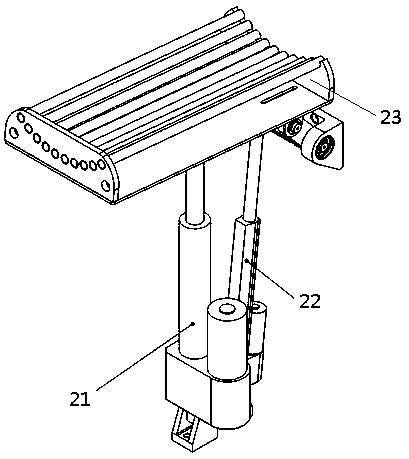
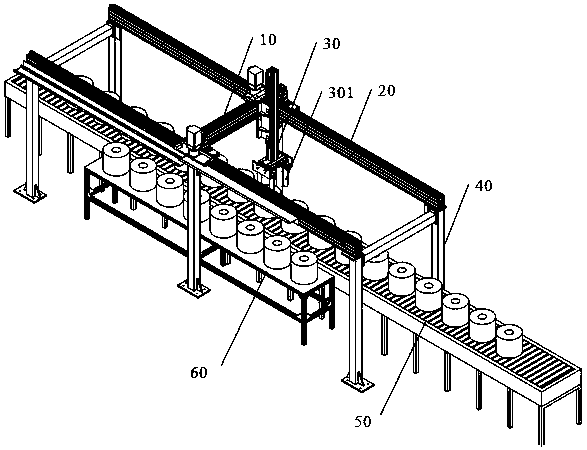
[0029] refer to figure 1 and figure 2 As shown, the AGV trolley control method of the present invention is applied to the AGV trolley system. The AGV trolley system includes an AGV trolley and a docking truss. One end is provided with a yarn-taking mechanism 2, and the other end of the vehicle frame 1 is provided with a yarn-setting platform 4, and the yarn-taking mechanism 2 is set on one side of the yarn-setting platform 4, and the docking truss includes a bracket 40, an X-axis guide rail 10, and a Y-axis guide rail 20 , the Z-axis guide rail 30, the grabbing mechanism 301 and the assembly line 50, the Y-axis guide rail 20 is arranged on the support 40, the X-axis guide rail 10 is arranged on the Y-axis guide rail 20, the Z-axis guide rail 30 is arranged on the X-axis guide rail 10, and the Z-axis The lower end of the guide rail 30 is provided with a grasping mech...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More