

Multi-view remote sensing image fusion method
A remote sensing image fusion and remote sensing image technology, which is applied in the field of geographic information, can solve the problem of low registration accuracy, and achieve the effect of high fusion accuracy and high precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
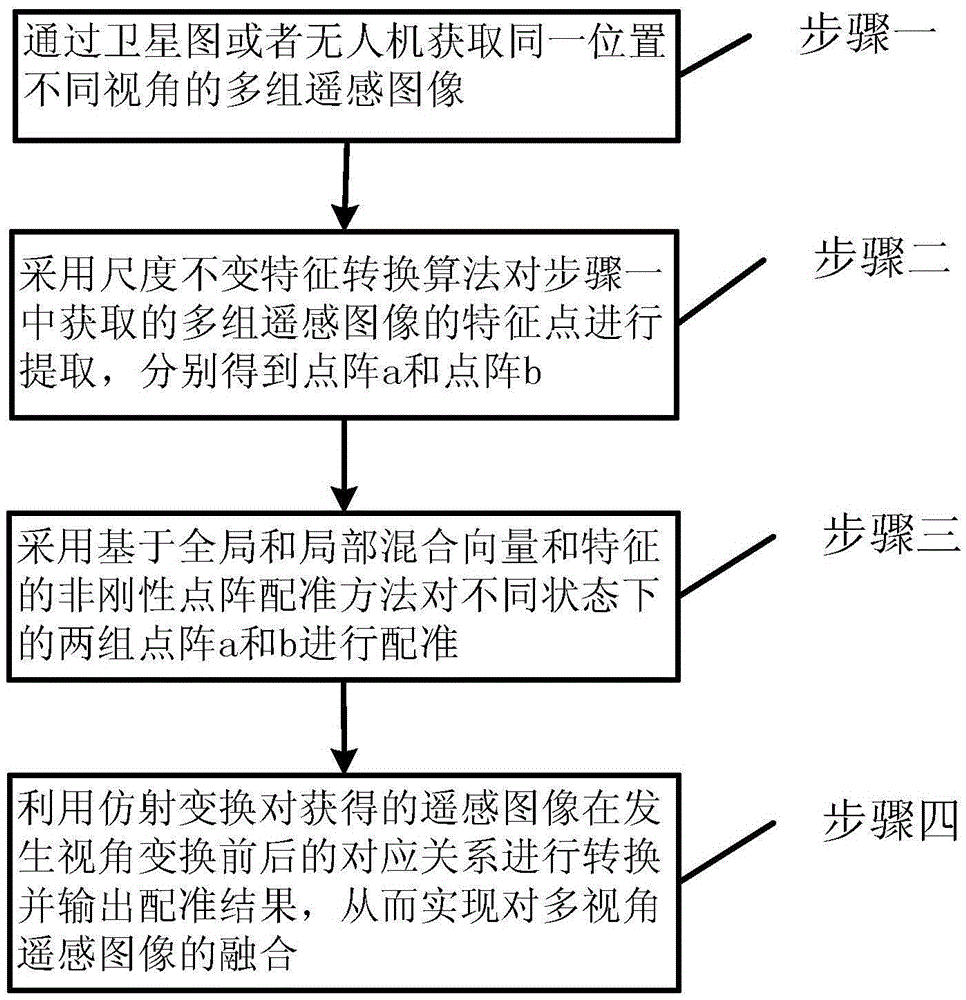
[0014] Specific implementation mode one: refer to figure 1 Specifically illustrate this embodiment, the multi-view remote sensing image fusion method described in this embodiment, the method includes the following steps:
[0015] Step 1. Obtain multiple sets of remote sensing images of the same location with different perspectives through satellite images or drones,
[0016] Step 2. Using the scale-invariant feature conversion algorithm to extract the feature points of multiple groups of remote sensing images acquired in step 1, and obtain lattice a and lattice b respectively,
[0017] Step 3. Using a non-rigid lattice registration method based on global and local mixed vectors and features to register two sets of lattices a and b in different states, the registration process is as follows:
[0018] Step 31. First create a deformable proxy lattice a w , in each step of the iteration, get a w Corresponding point b in lattice b c , where a w The initial state of is equal to...
specific Embodiment approach 2
[0028] Embodiment 2: This embodiment is to further explain the multi-view remote sensing image fusion method described in Embodiment 1. In this embodiment, the equation of the global and local mixed vector and feature in step 3 is:
[0029] According to the formula:
[0030] (Formula 1),
[0031] Obtaining the Global Structural Feature Difference Matrix Each element value in the matrix is two vectors and The modulus after subtraction,
[0032] In the formula, for point a i to point a k the geometric vector of for point b j to b k The geometric vector of , i and j are both positive integers, n and m are the upper bounds in the formula,
[0033] According to the formula:
[0034] (Formula 2),
[0035] Obtain local structural feature difference matrix
[0036] In the formula, K is the number of neighboring points, n(a i ) k for point a i The kth neighbor point of , n(b j ) k for point b j The kth neighbor point of , T is a translation function,...
specific Embodiment approach 3
[0037] Embodiment 3: This embodiment is to further explain the multi-view remote sensing image fusion method described in Embodiment 2. In this embodiment, in step 31, a deformable proxy lattice a is first created w , in each step of the iteration, get a w The steps of corresponding point bc in lattice b are:
[0038] According to the energy optimization equation:
[0039] E ( M ) = ( Σ i ∈ n Σ j ∈ m G a i b j + α Σ i ∈ n ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More