

Indoor robot positioning navigation method and device
An indoor robot, positioning and navigation technology, applied in the field of robot navigation, can solve the problems of low positioning accuracy, narrow application range, inconvenient use, etc., achieve the effect of fast movement speed, wide application range, and high cost
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments.
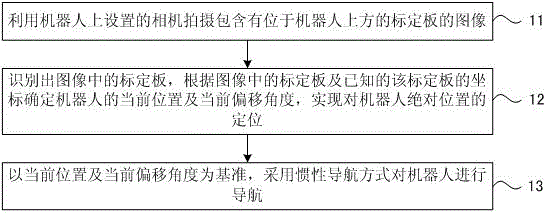
[0039] See figure 1 , which is a flow chart of an embodiment of the indoor robot positioning and navigation method of the present invention, specifically, a positioning and navigation method that combines visual positioning and inertial navigation.
[0040] Such as figure 1 As shown, the method for realizing indoor robot positioning and navigation in this embodiment specifically includes the following steps:
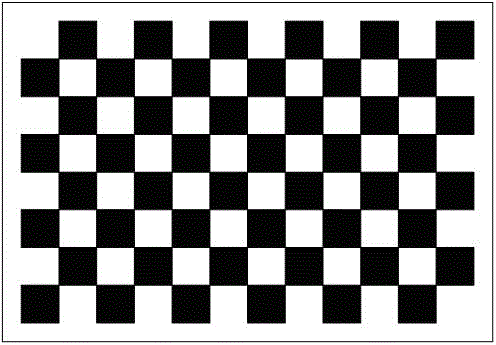
[0041] Step 11: Use the camera set on the robot to take an image including the calibration plate located above the robot.
[0042] In this embodiment, according to the activity area of the robot, a calibration plate is preset in the room. Specifically, above the active area of the robot, a plurality of calibration plates are suspended ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More