

Six-freedom parallel control self-correction return apparatus for space vector force loading
A technology of space vector and return device, which is applied in the direction of measuring devices, measuring fluid pressure, instruments, etc., can solve the problems that the space vector force cannot guarantee the calibration origin, the precision of the force measurement system is not high, and the calibration time is long, etc., so as to shorten the calibration The effect of time, simple design structure and convenient implementation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
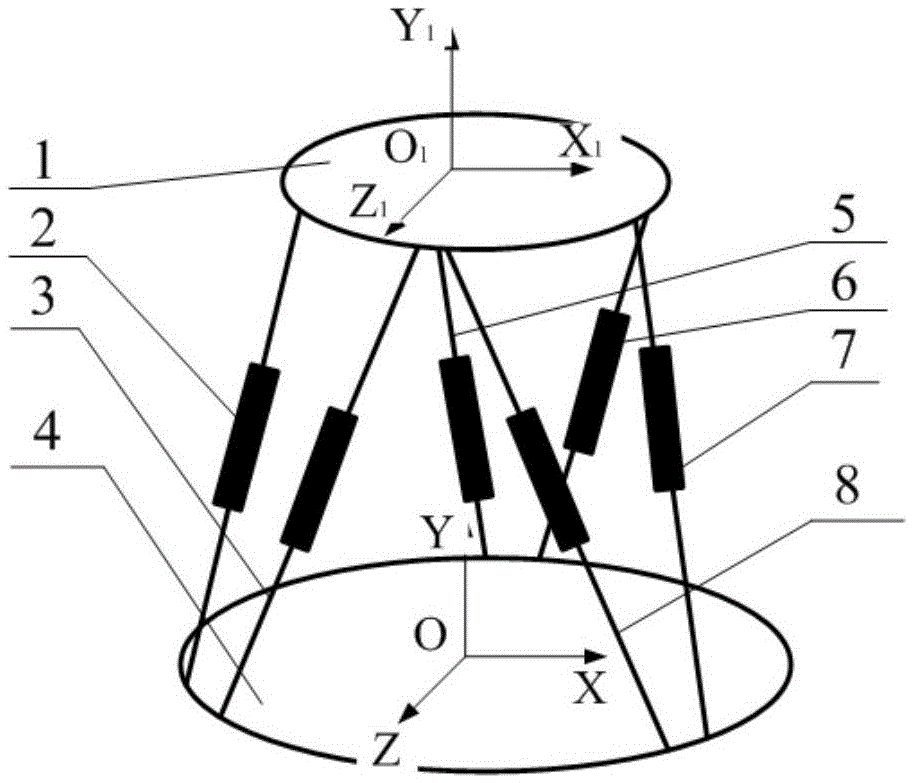
[0027] The invention is a six-degree-of-freedom parallel control self-calibration return device designed for space vector force loading, which mainly includes a moving part, a force measuring part and a loading part. The implementation as a whole is:
[0028] 1) According to the structure of the equipment to be calibrated, preliminarily design the spatial size and layout of the moving parts;
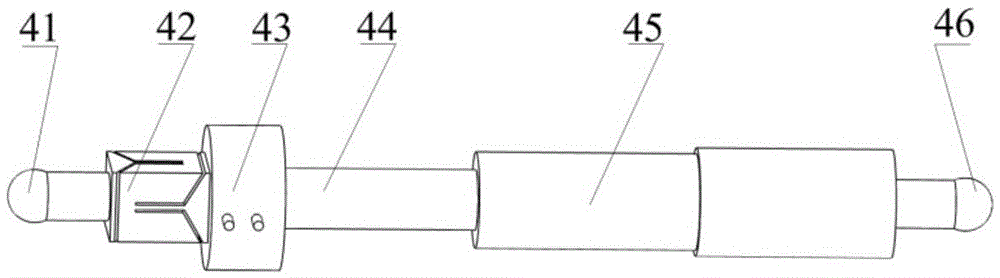
[0029] 2) Design force-measuring parts and loading parts according to the force-measuring range of the equipment to be calibrated;
[0030] 3) Structural design and optimization of moving parts;
[0031] 4) Structural design and optimization of force measuring parts and loading parts;
[0032] 5) System assembly and debugging;
[0033] 6) Calibration and correction of the system;
[0034] The specific principles and implementation methods are as follows:
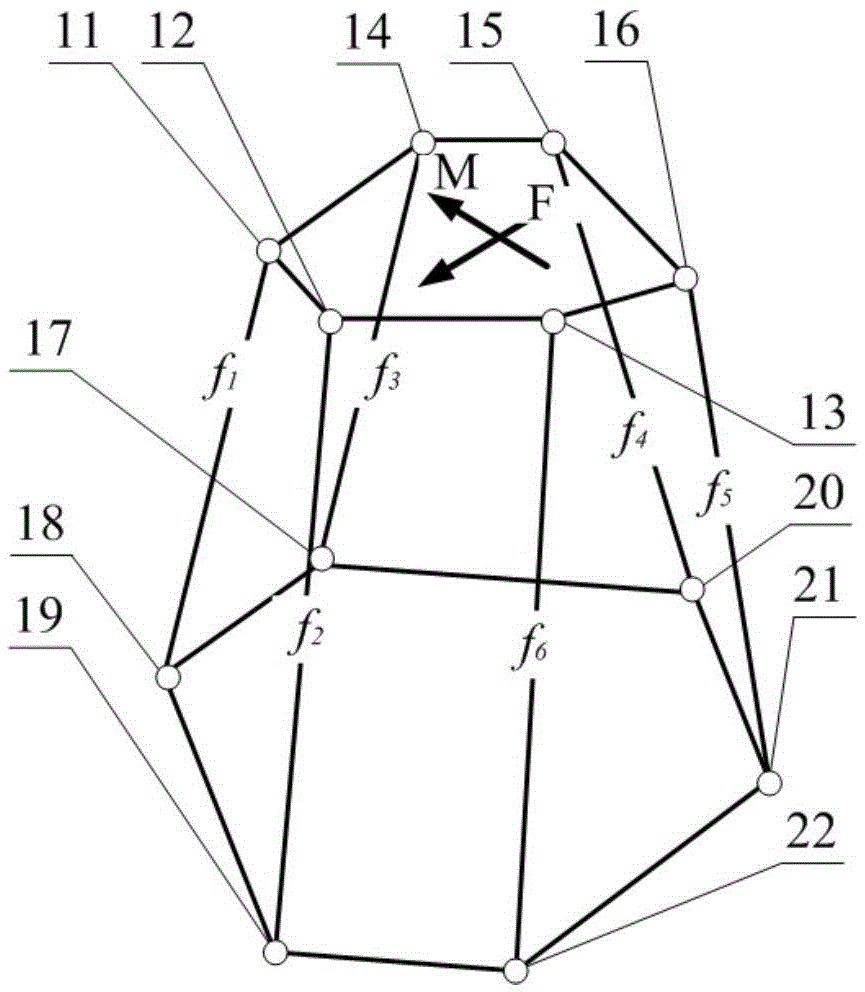
[0035] The six-degree-of-freedom parallel control self-calibration return device for space vector force loading introduced by th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More