Fingertip depth detection method and system
A depth detection and fingertip technology, applied in the field of computer vision, can solve the problems of inaccurate fingertip depth detection results and slow processing speed, and achieve the effects of narrowing the parallax search range, increasing processing speed, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] Embodiments of the present invention will be described in detail below with reference to the accompanying drawings.
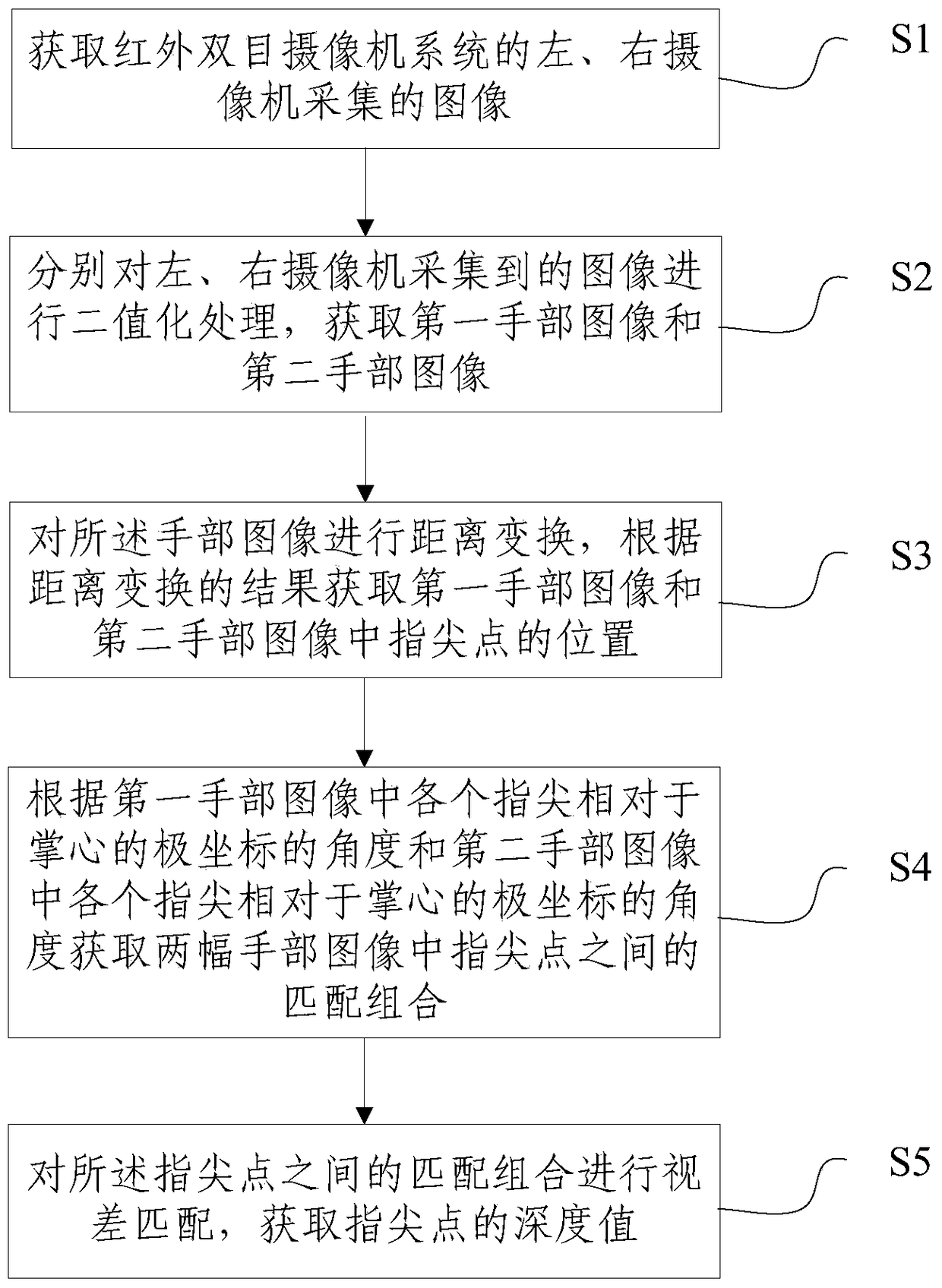
[0056] figure 1 is a schematic diagram of a fingertip depth detection method according to an embodiment of the present invention. Such as figure 1 As shown, the fingertip depth detection method includes:
[0057] S1: Obtain images collected by the left and right cameras of the infrared binocular camera system;
[0058] S2: Binarize the images collected by the left and right cameras respectively to obtain the first hand image and the second hand image;
[0059] S3: Perform distance transformation on the hand image, and obtain the positions of the fingertip points in the first hand image and the second hand image according to the result of the distance transformation;
[0060] S4: According to the angle of the polar coordinates of each fingertip in the first hand image relative to the center of the palm and the angle of the polar coordinates of each fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com