

Rehabilitation robot with horizontal and vertical multi-angle adjustment
A rehabilitation robot, multi-angle technology, applied in gymnastics equipment, passive exercise equipment, sports accessories, etc., can solve the problems of high center of gravity, touch, injury, etc., and achieve the effect of compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
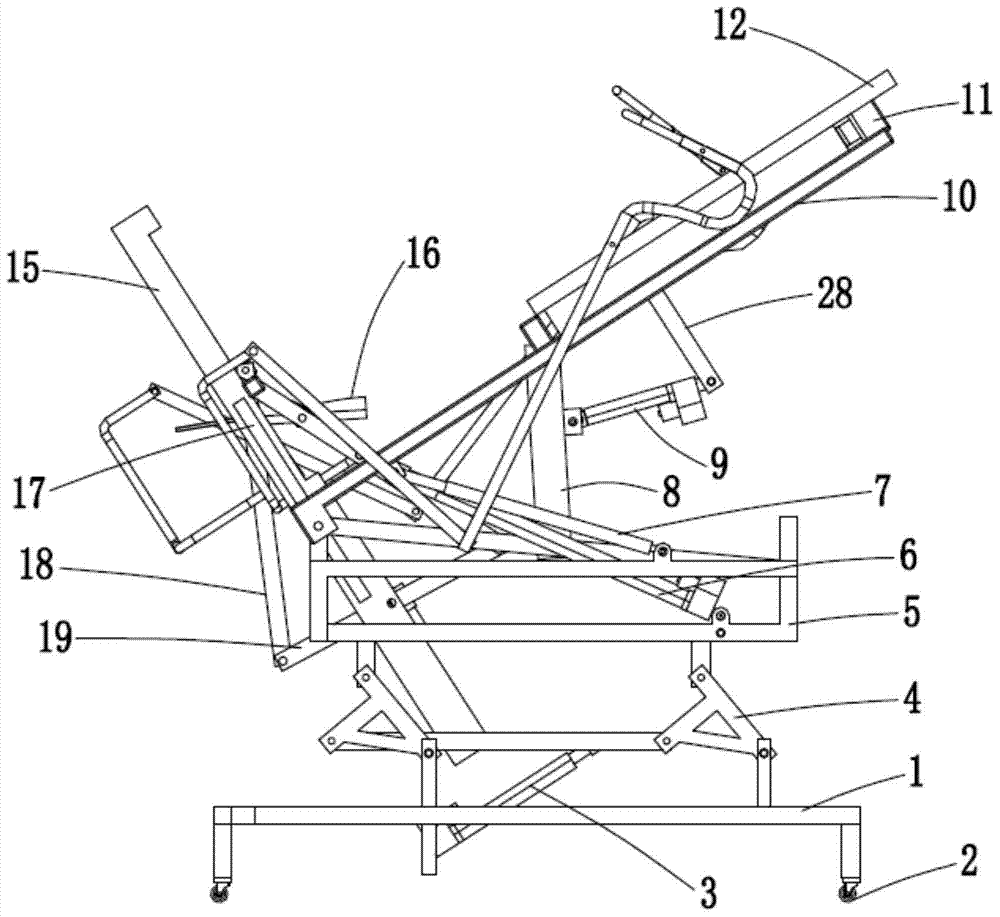
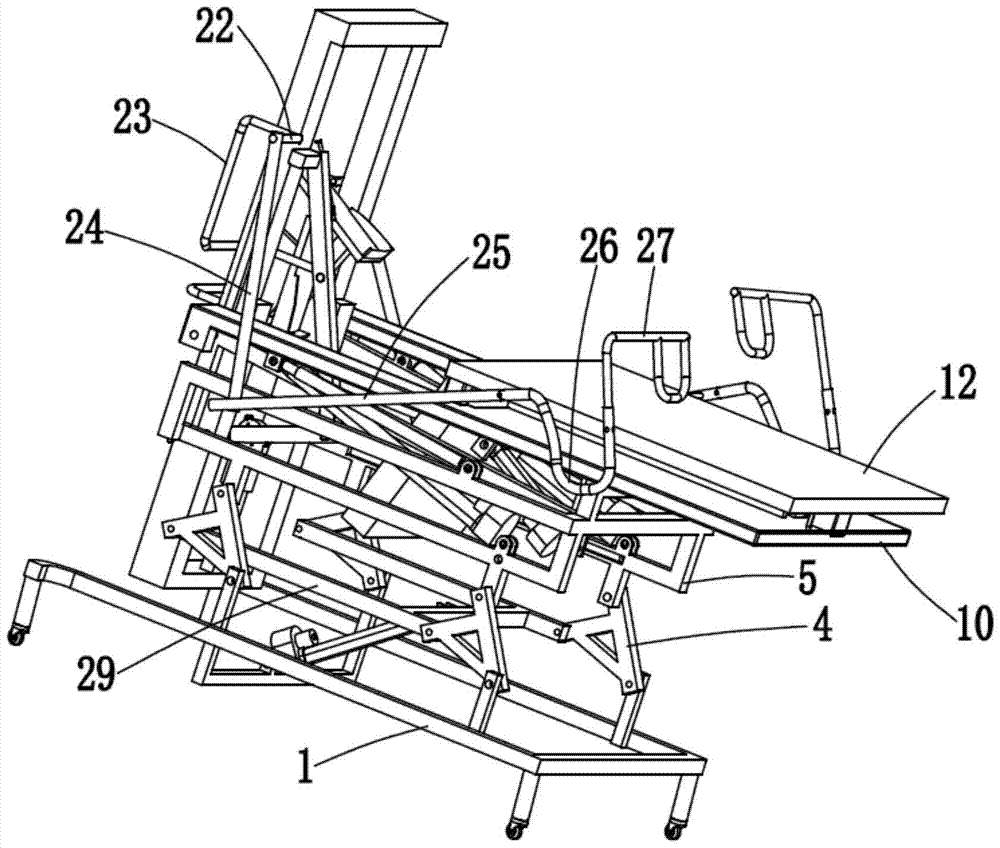
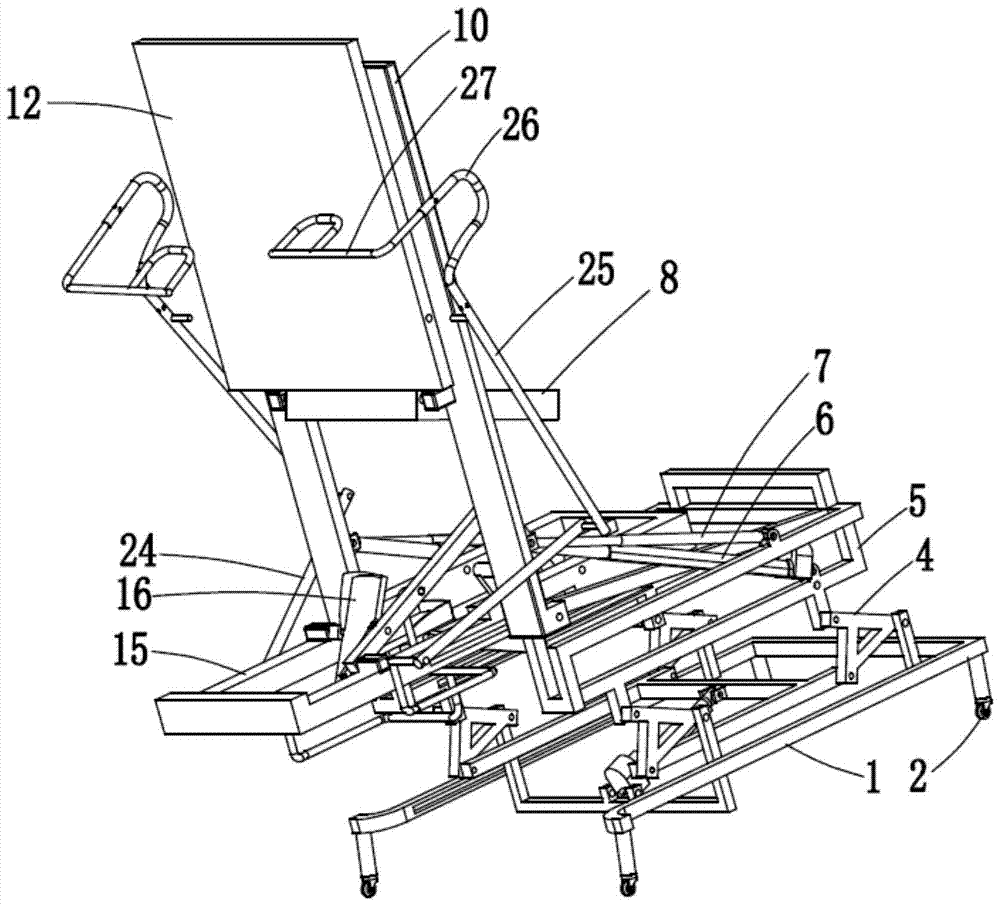
[0029] Embodiment: Referring to the accompanying drawings, the reclining and standing multi-angle adjustment rehabilitation robot of the present embodiment has:
[0030] The height of the secondary bed support frame 5 that can be lifted is hinged with a movable bed 10 at its end, and one end of the first linear actuator 6 and buffer 7 is hinged on the back of the movable bed 10, and the other end is hinged on the secondary bed. On the bed support frame 5, the first linear actuator 6 is used to adjust the pitch angle of the movable bed 10; the buffer 7 is used to reduce the vibration caused when the movable bed 10 rotates.
[0031] In the specific setting, the top of the movable bed 10 is a plate-shaped bed surface, and the lower part of the movable bed is hollow, that is, the lower part is two parallel rods, and the movable bed is hinged on the secondary bed support frame 5 with the bottom ends of the two rods. The end portion of the bed; the bed surface is stacked with a slid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More