

Vision-based AGV navigation method
A navigation method and visual technology, applied in two-dimensional position/channel control and other directions, can solve the problems of inability to recognize the guide line and low recognition accuracy of the guide line.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
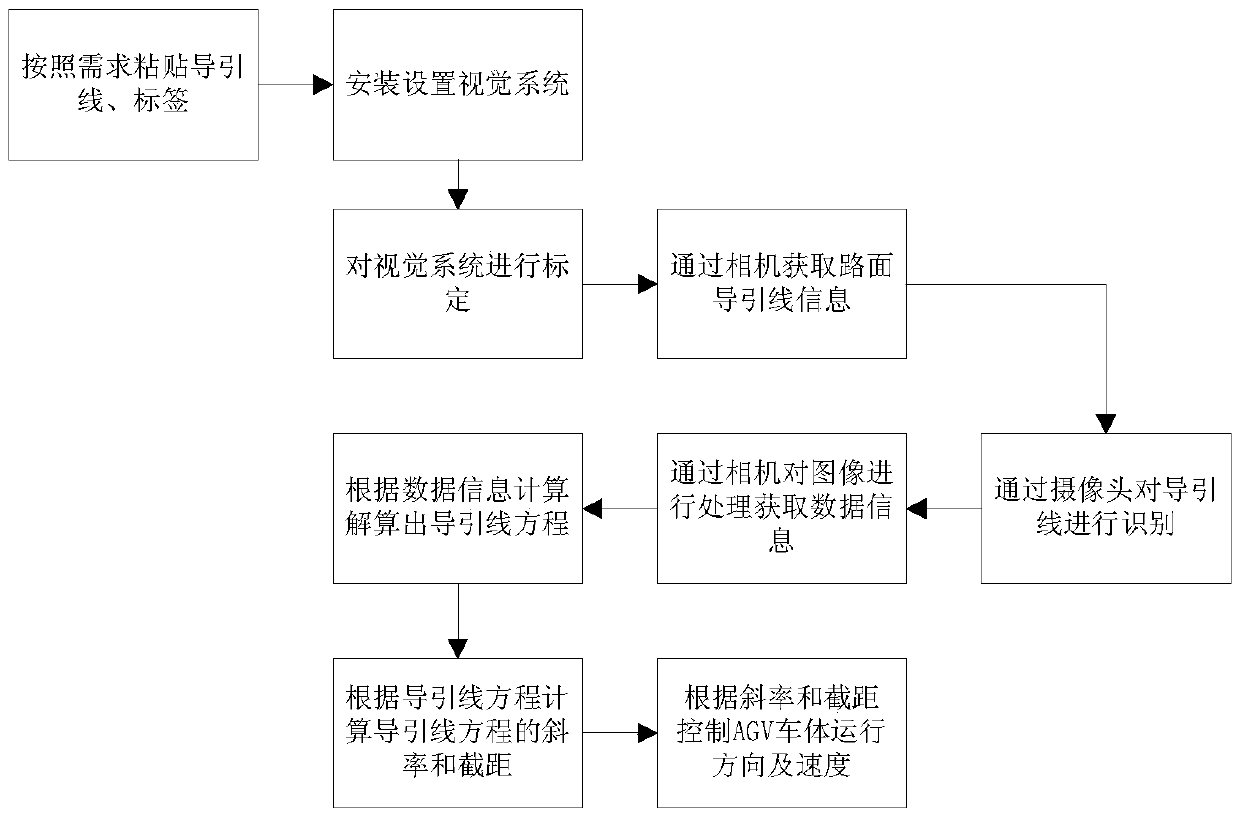
[0044] The automatic guided vehicle (AGV) usually adopts the image recognition navigation method, which is realized by painting or pasting the ribbon on the driving path of the automatic guided vehicle (AGV), and processing the ribbon image signal captured by the camera. Path navigation, based on image recognition navigation technology, enables automatic guided vehicles (AGV) to have the ability to independently distinguish complex road conditions such as intersections and parking stations, and at the same time meet the needs of precise positioning. In addition, the automatic guided vehicle (AGV) has the advantages of high efficiency, high degree of automation, cost saving, and can be applied to special occasions that are not suitable for human handling, and its scope of application is becoming wider and wider.
[0045] Therefore, the present invention proposes a vision-based AGV (Automatic Guided Vehicle) navigation method. First, the road surface guide line information is obt...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More