

A Modified Wheel-Tread-Leg Composite Robot
A technology of robots and wheel shoes, which is applied in the field of mobile robots, can solve the problems of low speed and efficiency, limited ability to overcome obstacles, and small grounding specific pressure, etc., and achieve the effect of fast traveling speed, novel scheme and strong maneuverability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
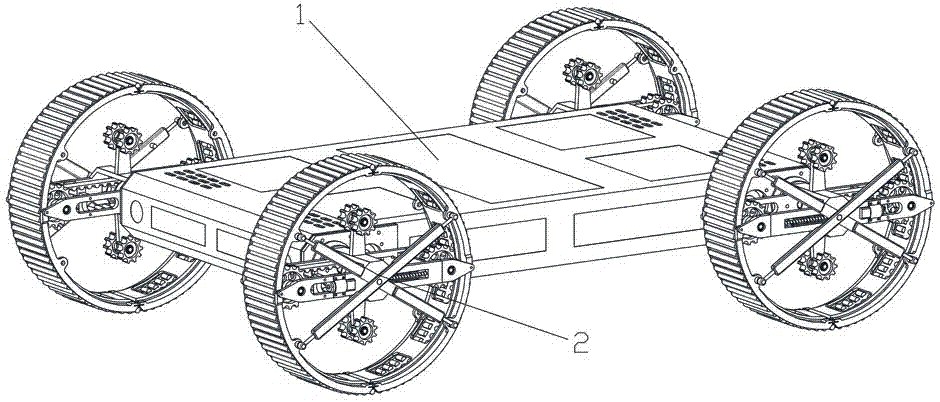
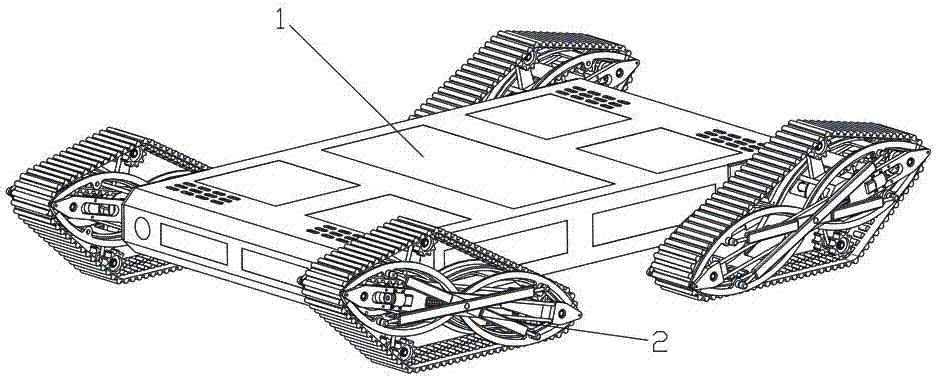
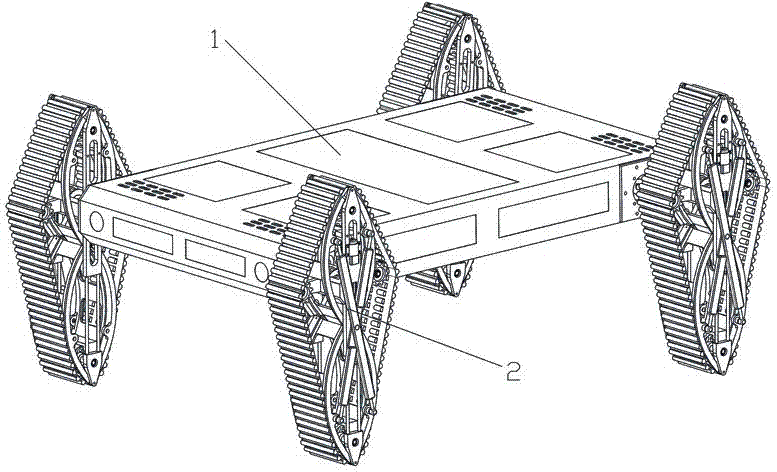
[0030] Such as Figure 1 to Figure 13 As shown, the modified wheel-track-leg compound robot of the present invention includes a chassis 1, more than three deformed wheel parts 2 (four in this example) mounted on the chassis 1, and a traveling drive mechanism. The traveling drive mechanism includes a traveling power device 21 , a track driving wheel 23 and a track driven wheel 24 . The deformed wheel component 2 includes a deformed rim 27 and a deformed switching mechanism. The deformed rim 27 includes a plurality of arc-shaped rim pieces 271 hinged end to end to form a rim, and the outside of the rim is wrapped with a track 272 (such as a rubber track). The crawler belt 272 is used to cooperate with the crawler belt drive wheel 23 and the crawler belt driven wheel 24 to form the crawler belt driving state; the deformation switching m...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More