

Joint calibration method of binocular camera and inertial navigation unit in automatic driving
A technology of inertial navigation and binocular camera, which is applied in the field of joint calibration of binocular camera and inertial navigation unit in automatic driving, can solve problems such as camera data errors, and achieve rapid calibration, simple tools and processes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
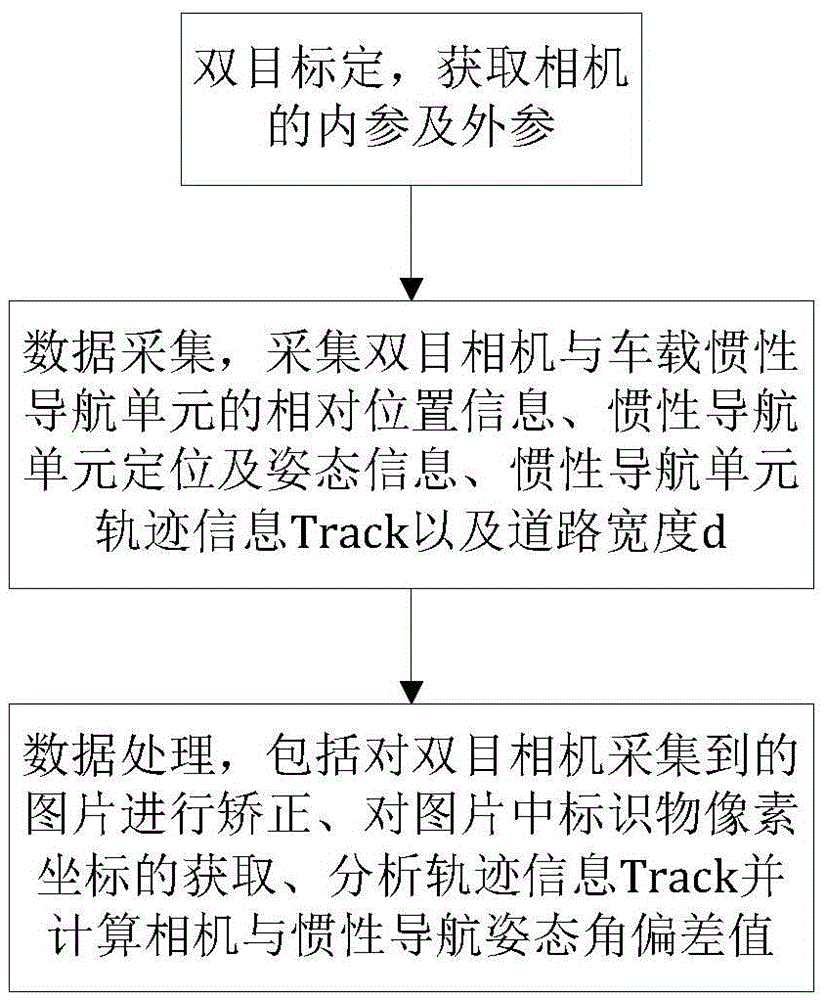
[0032] An embodiment of the present invention provides a method for joint calibration of a binocular camera and an inertial navigation unit in automatic driving, including the following steps:
[0033] 1: Preparation stage
[0034] ①Two-target positioning, to obtain the internal and external parameters of the camera;
[0035] 2: Data collection
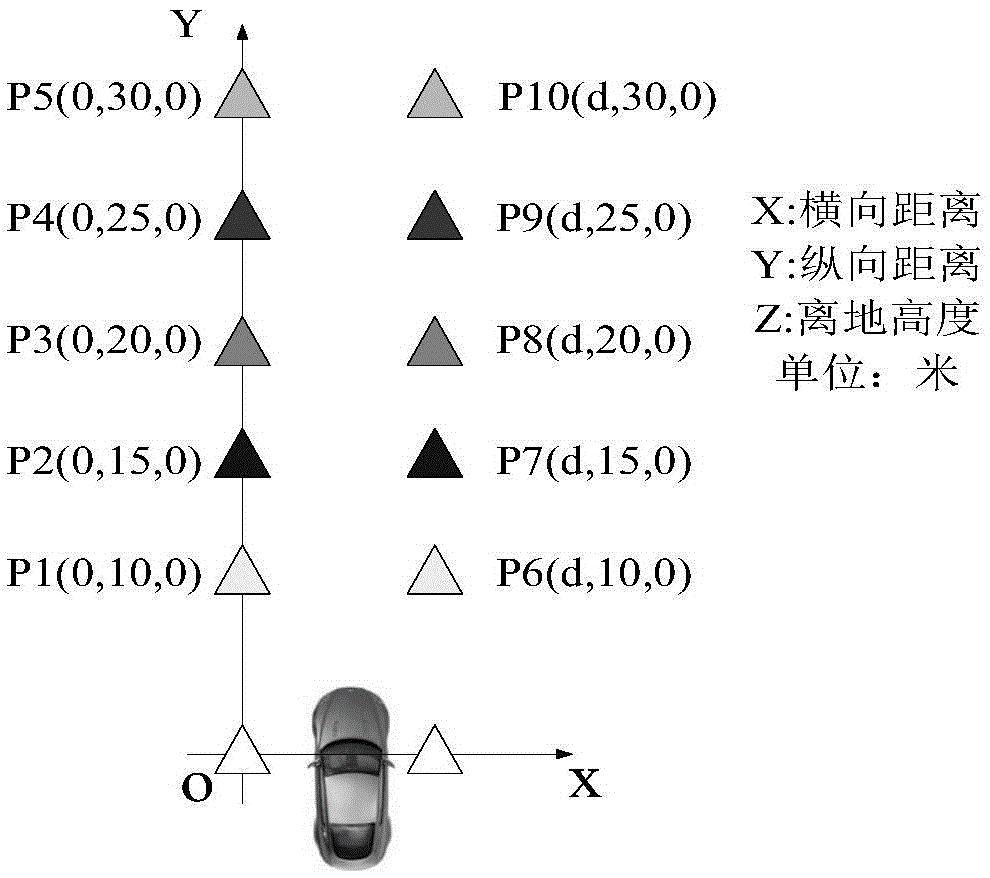
[0036] ①Measure the three-dimensional offset (ΔTx, ΔTy, ΔTz) of the left eye camera relative to the antenna after the integrated inertial navigation and the height h of the binocular camera from the ground with measuring tools such as a tape measure or tape measure, accurate to centimeters; since the binocular parameters have already It includes the spatial position relationship of the left and right cameras, so it is only necessary to calibrate the left or right camera and the inertial navigation to determin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More