

Industrial robot kinematic modelling method and system
A technology of robot kinematics and industrial robots, applied in manipulators, manufacturing tools, program control manipulators, etc., can solve the problems of lack of versatility and achieve the effect of strong versatility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
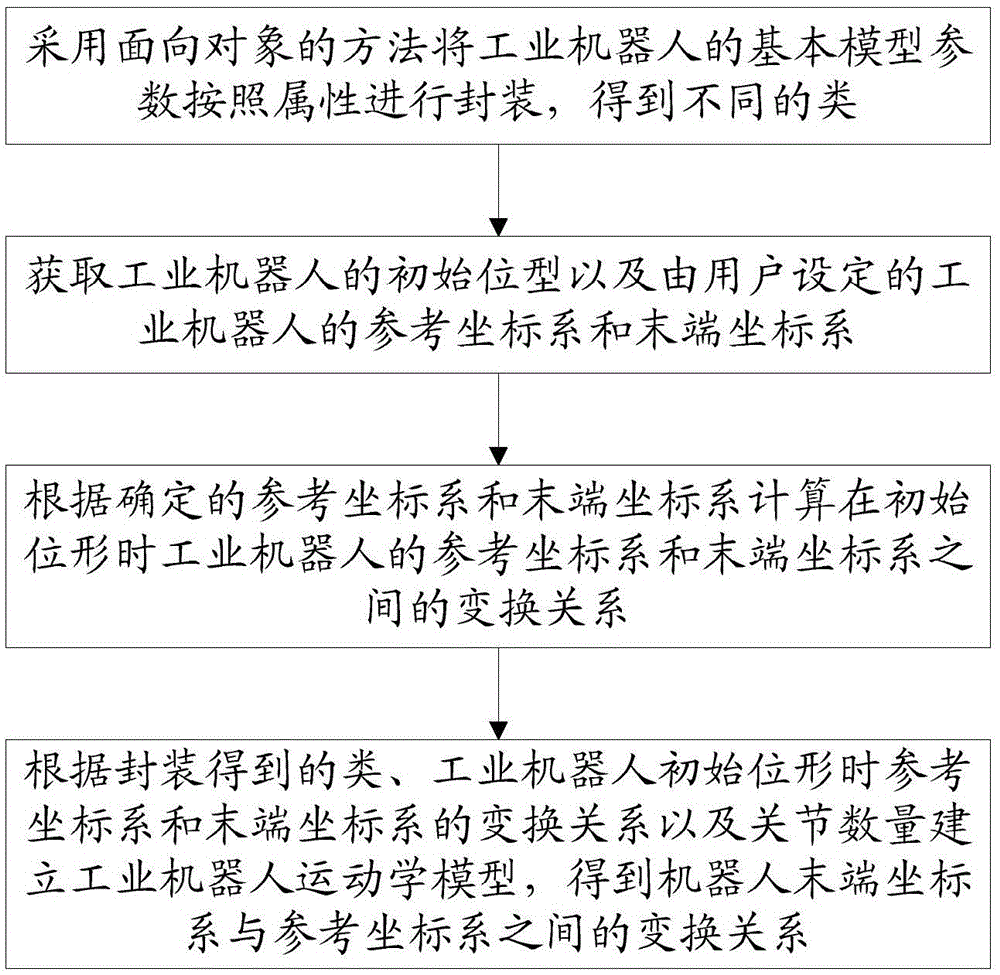
Method used
Image

Examples
Embodiment 1
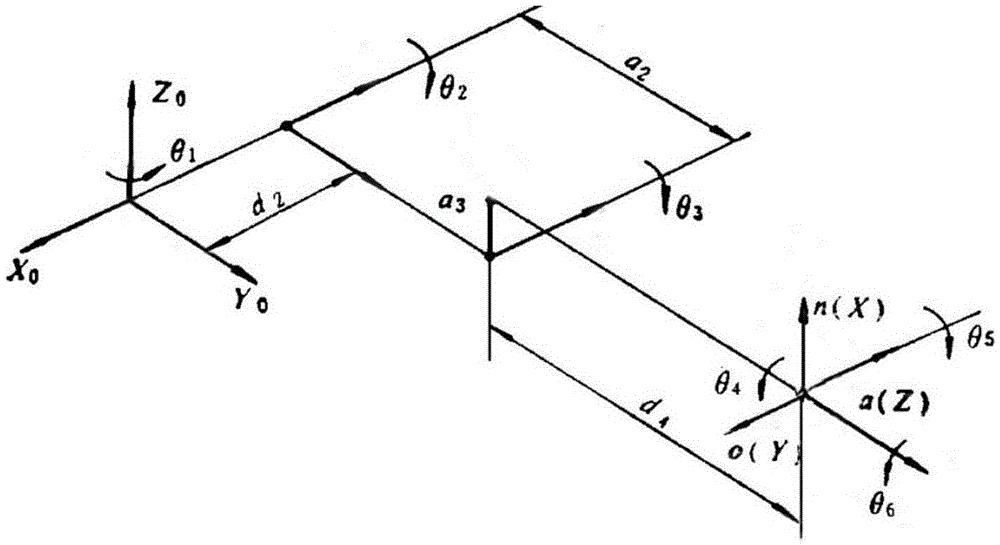
[0081] According to the industrial robot kinematics modeling method established in the present invention, the industrial robot composed of six rotary joints is used as the research object to carry out verification.
[0082] The robot structure is as figure 2 As shown, the current position is the initial configuration, the base coordinate is selected as the reference coordinate system S, and the end coordinate system T, and the directions of the two coordinate systems are consistent. The axis position of joint 1 is used as the origin of the reference coordinate system. where d 2 is the distance between the axis position of joint 2 along the negative direction of the x-axis of the reference coordinate system and the origin of the reference coordinate system; a 2 is the distance between the axis position of joint 3 and the origin of the reference coordinate system along the negative direction of the x-axis of the reference coordinate system; the axis positions of joints 4, 5, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More