

Repositioning method for mobile robot
A mobile robot and relocation technology, applied in the field of mobile robots, can solve the problems of poor relocation accuracy, unsatisfactory robot relocation, and little information of laser ranging sensors, and achieve the effect of improving relocation accuracy and speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
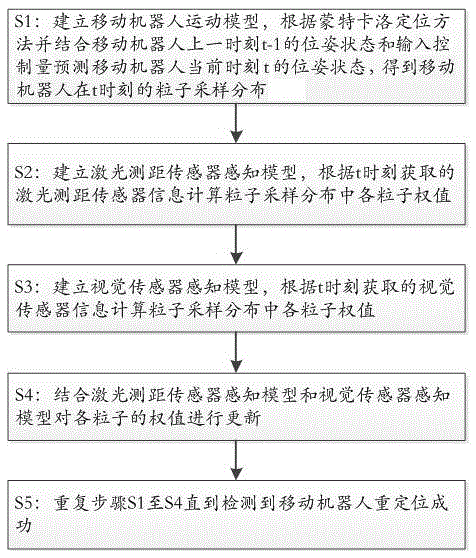
[0016] The solution of the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0017] The patent application of the present invention is a relocation method for a mobile robot, and the basis for the realization of the method is based on all or part of the established map area. When the mobile robot is located at the position of the map that has been built in the area, the mobile robot is relocated according to the method of the present invention; Carry out repositioning according to the method of the present invention.
[0018] Since the patent application of the present invention is based on the Monte Carlo positioning method, the Monte Carlo positioning method is first described here: MonteCarlo positioning is a probabilistic positioning method, and the principle is based on the Bayesian algorithm. Localization is achieved by recursively estimating a probability distribution over the pose stat...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More