

SCARA robot joint zero returning control method
A technology of robot joints and robots, which is applied in the direction of program-controlled manipulators, manipulators, manufacturing tools, etc., to improve positioning accuracy and avoid collision damage
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The specific embodiment of the present invention will be described in further detail by describing the embodiments below with reference to the accompanying drawings, the purpose is to help those skilled in the art to have a more complete, accurate and in-depth understanding of the concept and technical solutions of the present invention, and contribute to its implementation.
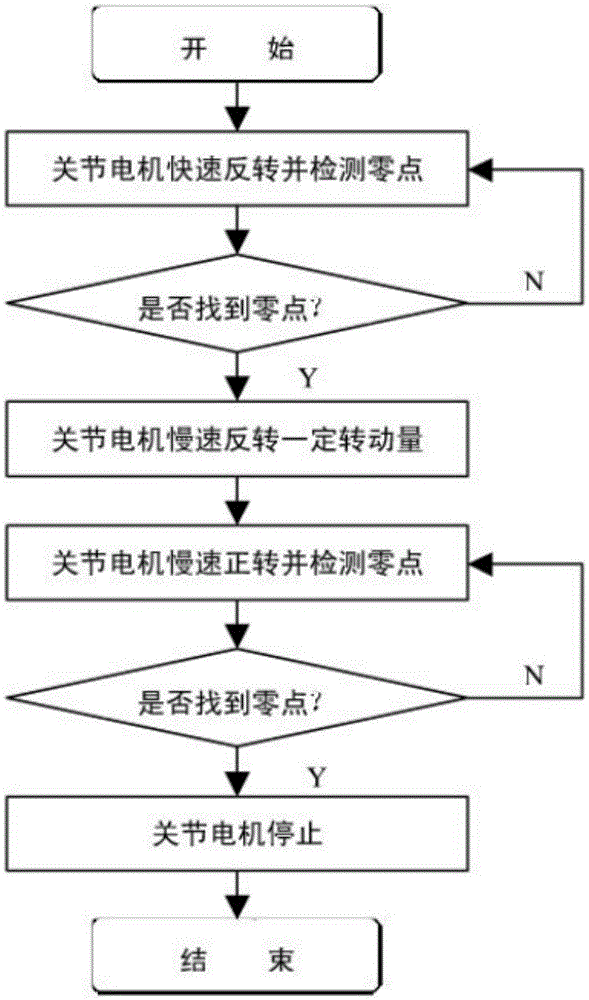
[0018] Such as figure 1 As shown, the present invention provides a kind of SCARA robot joint zero return control method, and it comprises the following steps:
[0019] (1) The joint motor reverses and detects the zero point;
[0020] (2) When the zero position is detected, the joint motor continues to reverse;
[0021] (3) The joint motor rotates forward and detects the zero point;
[0022] (4) When the zero position is detected, the joint motor stops running, and the zero return process is completed.
[0023] Specifically, according to the control function requirements of the system, the SCAR...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More