

Small unmanned helicopter adaptive attitude control method of dynamic-model-free structure
A technology of unmanned helicopters and control methods, which is applied in the field of flight control research of small single-rotor unmanned helicopters, and can solve the problem of model dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
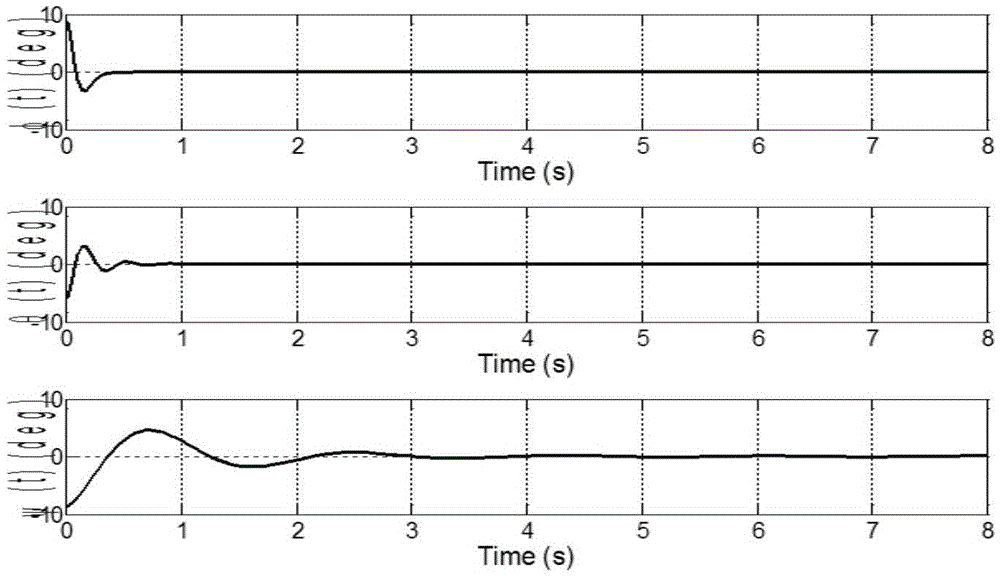
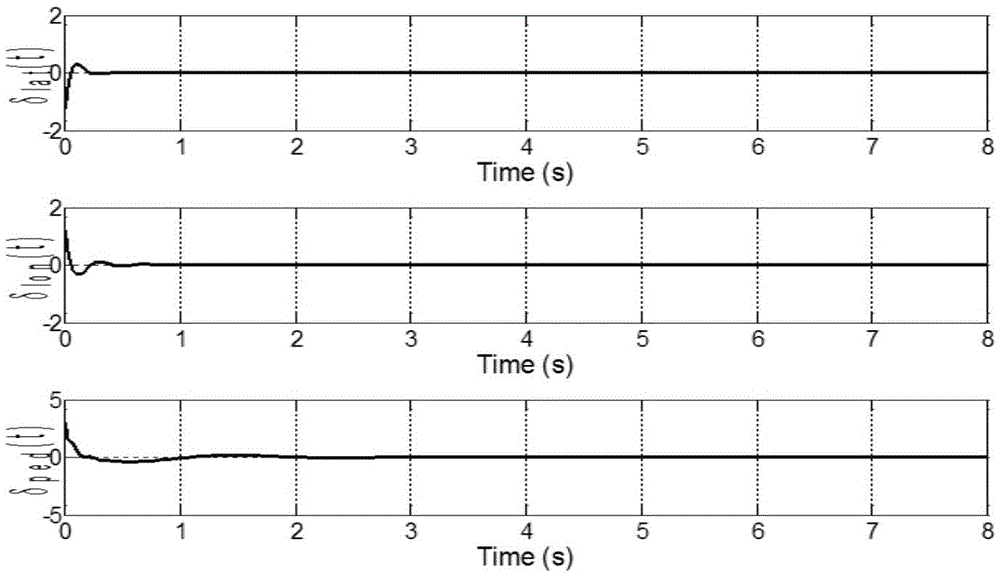
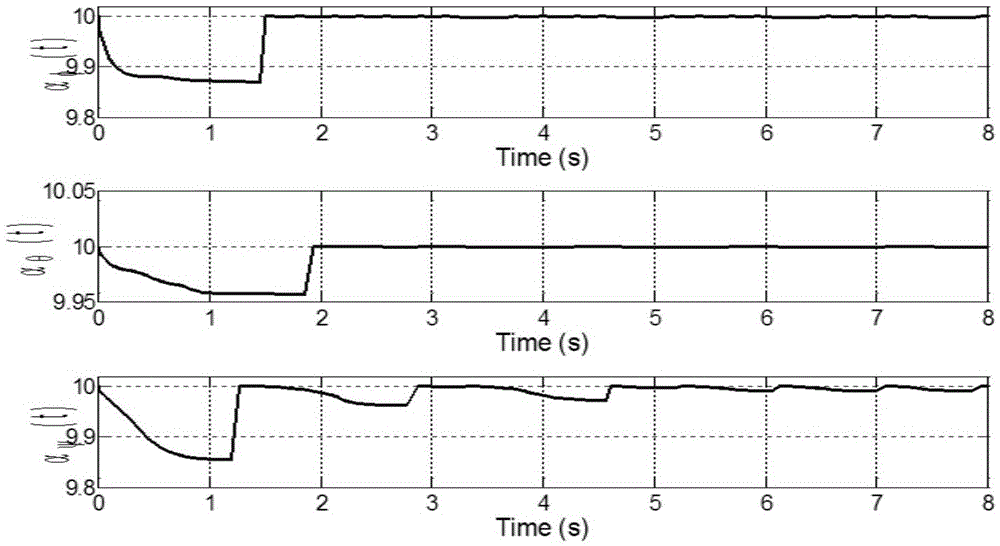
[0088] In order to avoid the heavy dependence on the system model when designing the controller and the robustness analysis problem under unmodeled dynamics, the present invention adopts the theoretical method of model-free structure self-adaptation to design a new type of model-free structure self-adaptive sliding mode control The controller has stability characteristics such as quasi-sliding mode and input boundedness. The designed controller only needs the input and output data of the system to realize the attitude control of the unmanned helicopter. From the attitude model of the unmanned helicopter, it can be known that the unmanned helicopter has strong coupling in the pitch and roll directions, while the yaw direction is relatively independent. A single-input-single-output system was used for analysis.
[0089] It should be noted that the present invention uses superscripts and subscripts to represent the whole variable, because the analyzed systems are all discrete sys...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More