Method for planning shortest path in robot obstacle avoidance
A shortest path, robot technology, used in road network navigators, navigation calculation tools, etc., can solve problems such as long paths, inconsistent with robot motion habits, and failure to plan obstacles.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] The technical solutions of the present invention will be described in detail below in conjunction with the drawings and embodiments.
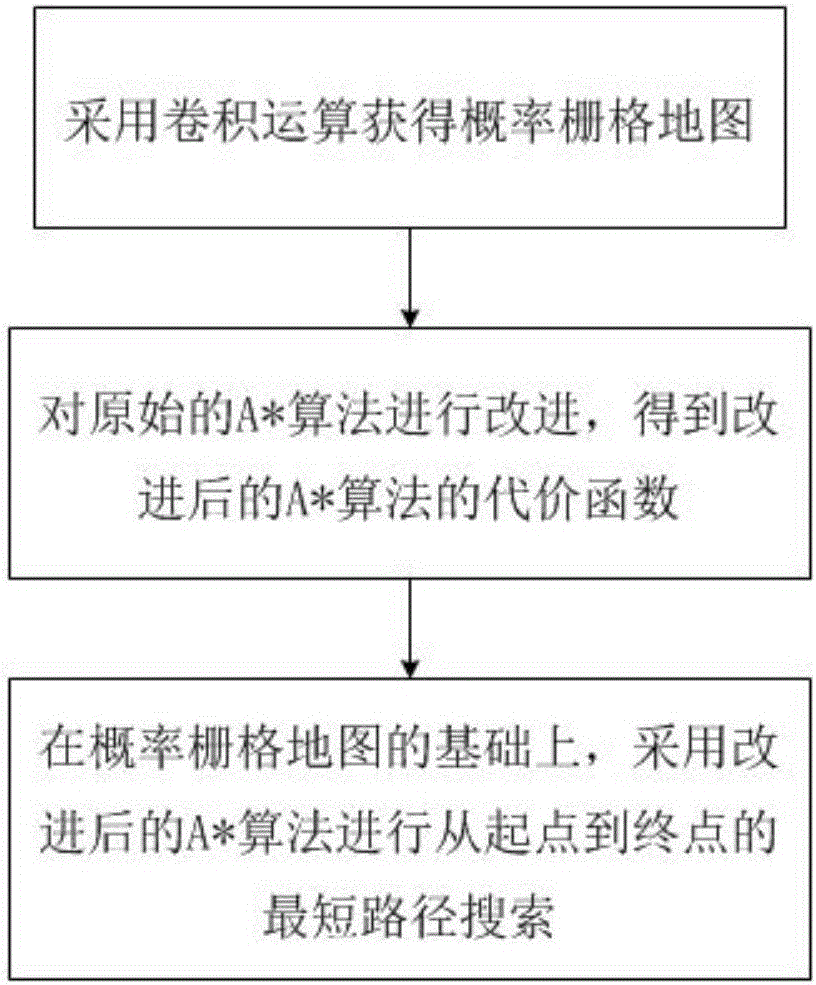
[0044] Such as figure 1 Shown, the present invention provides a kind of shortest path planning method in robot obstacle avoidance, and it comprises the following steps:
[0045] 1) The probability grid map is obtained by convolution operation, and the specific process is as follows:
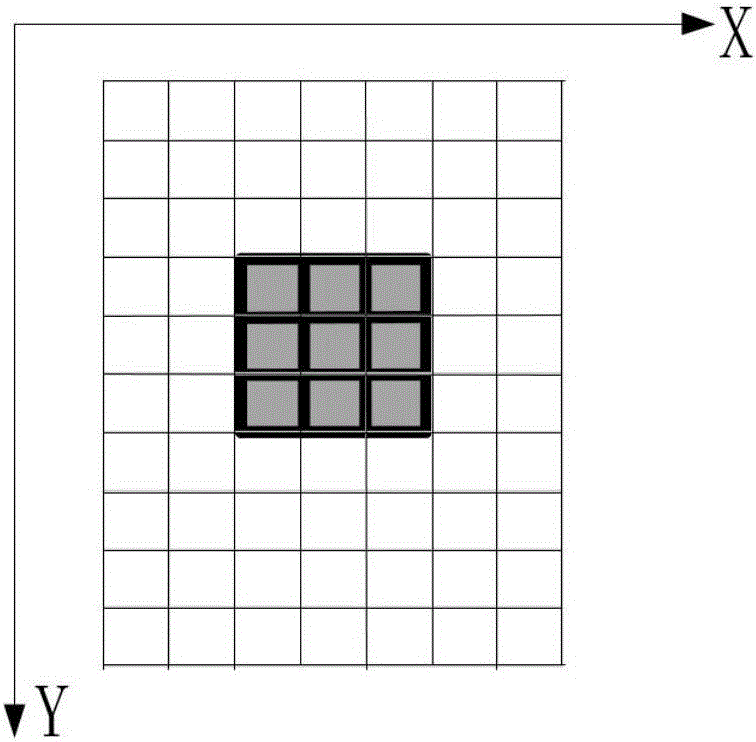
[0046] (1) Utilize a two-dimensional array to define a grid map, which includes:
[0047] The raster types in the custom raster map are: FREE, OBSTACLE, START, END, and PROBABILITY. Among them, FREE means that there is no obstacle at all, OBSTACLE means that there is an obstacle, START means the starting point, and END means the end point; PROBABILITY indicates the possibility of the existence of obstacles from high to low, and the larger the value of PROBABILITY, the possibility of the existence of obstacles The greater the sex.
[0048] The data types...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com