

Unmanned mowing vehicle outdoor navigation and control method based on GPS-RTK technology
A GPS-RTK, control method technology, applied in navigation, surveying and navigation, road network navigator and other directions, can solve the problems of poor real-time performance and low navigation and positioning accuracy, and achieve the effect of simplifying control difficulty and improving real-time performance and accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] Attached below figure 1 , 2 The present invention is described in detail:
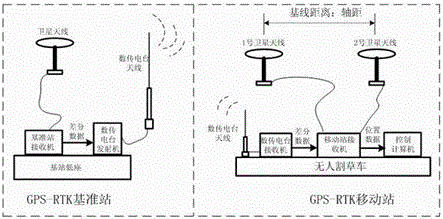
[0021] (1) GPS-RTK construction scheme such as figure 1 As shown, the reference station is composed of a GPS receiver and a radio station transmitter, which are fixed at a high place, and the coordinate information of the base station is sent to the mobile station through the radio station in real time;
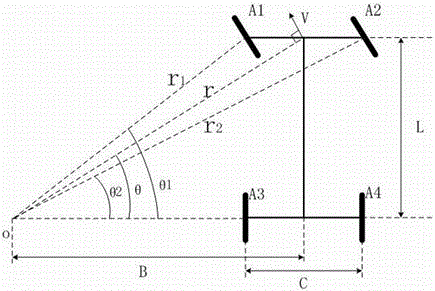
[0022] The mobile station consists of a dual-antenna GPS receiver and a radio receiver placed on the roof of the unmanned vehicle. The No. 1 satellite antenna is placed in the center of the rear axle of the vehicle, and the No. 2 satellite antenna is placed in the center of the front axle of the vehicle; the No. 1 antenna The direction pointing to the No. 2 antenna is the heading angle δ of the unmanned lawnmower;
[0023] (2) The data format output by the GPS receiver on the unmanned mowing vehicle is GPRMC data, including information such as position, heading and speed; the update frequenc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More