

Positioning and navigation method for indoor robot
An indoor robot, positioning and navigation technology, applied in navigation, mapping and navigation, navigation calculation tools, etc., can solve the problems of large error, long processing time, and large number of sensors, and achieve the effect of correcting path deviation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings, but it is not limited to this. Any modification or equivalent replacement of the technical solution of the present invention without departing from the spirit and scope of the technical solution of the present invention should be covered by the technical solution of the present invention. in the scope of protection.
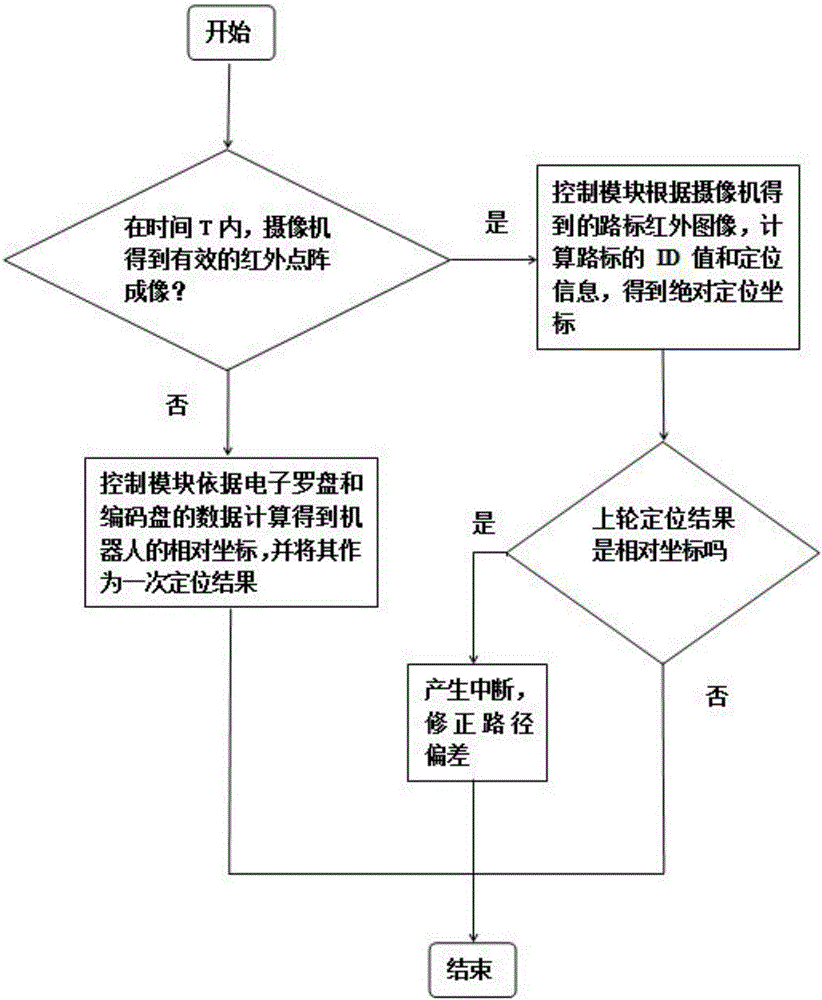
[0030] The present invention uses a monocular vision positioning system based on passive infrared road signs to locate the indoor robot. The positioning system is mainly divided into four modules: a robot, a camera installed on the robot, a road sign label attached to the ceiling, and a control module.
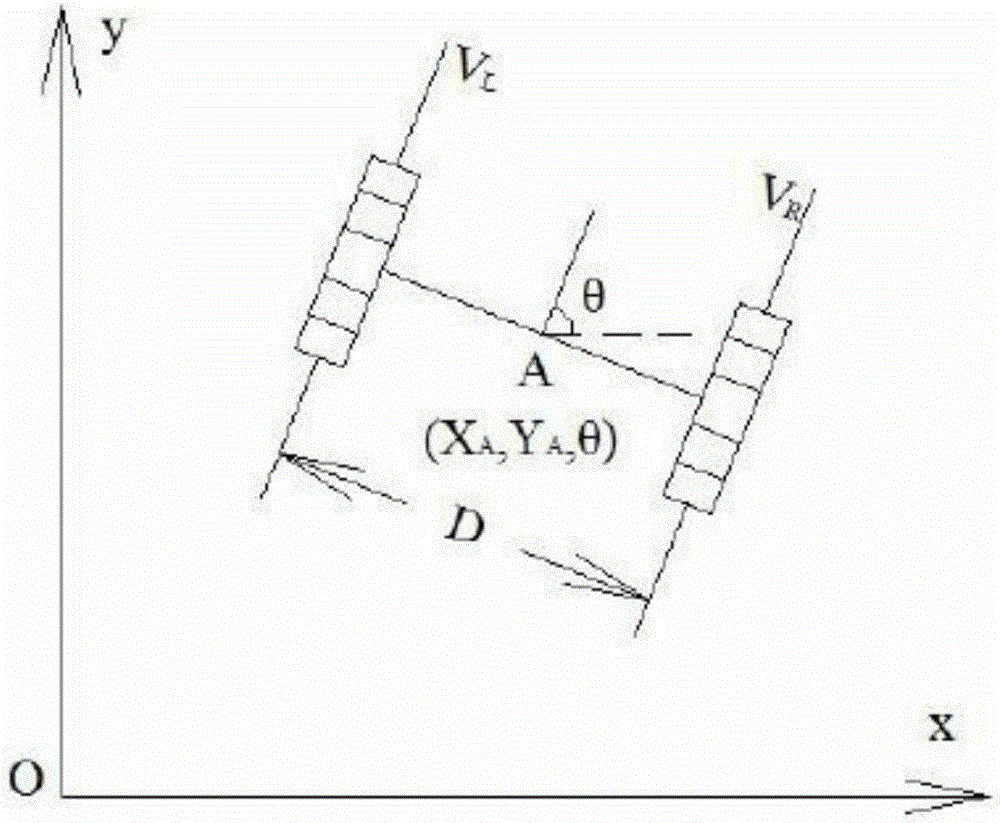
[0031] The robot is equipped with an electronic compass and an encoding disc, which can detect the changing angle and displacement, and according to the starting point coordinates of the robot, the control module can calculate the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More