Quadrotor flying robot non-linear trajectory tracking controller and tracking control method thereof
A flying robot and trajectory tracking technology, applied in attitude control, three-dimensional position/lane control, etc., can solve problems such as limiting the maneuverability of flying robots and environmental interaction capabilities, restricting performance, and losing control of flying robots, so as to improve trajectory tracking performance, The effect of avoiding the lack of linearization and simplifying the design steps
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in detail below in conjunction with the accompanying drawings.
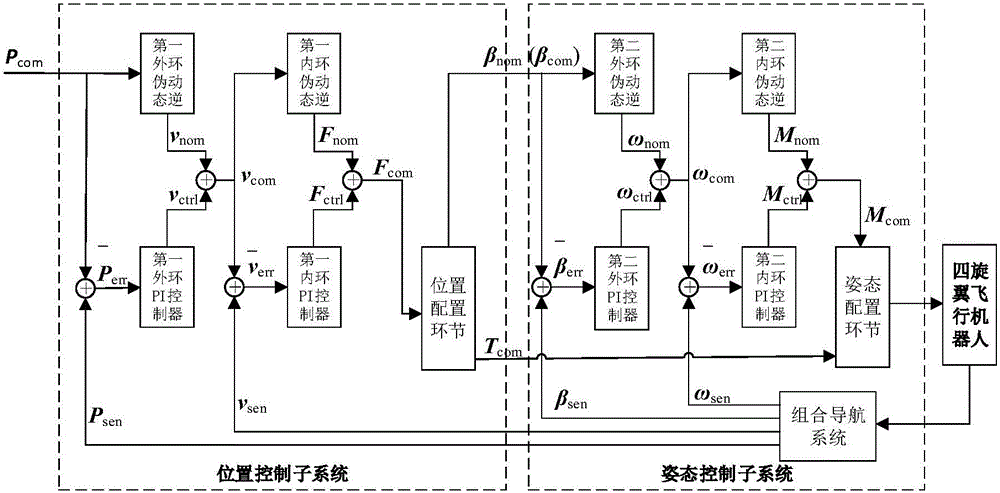
[0017] The present invention provides a nonlinear trajectory tracking controller and its control method for a four-rotor flying robot. The command value is used instead of the nominal value to design the control loop, such as figure 2 As shown, the tracking controller provided by the present invention is composed of two parts: a position control subsystem and an attitude control subsystem. The position control subsystem includes the first outer loop pseudo-dynamic inverse, the first outer-loop PI controller, the first inner-loop pseudo-dynamic inverse, the first inner-loop PI controller and a position configuration link, and the position configuration link is based on force Command F com Calculate the attitude command value β com and the total pull T the four rotors should produce com , output to the attitude control subsystem. The attitude control subsystem inc...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com