

Modular high-redundancy multi-freedom-degree flexible mechanical arm system
A technology of flexible manipulators and degrees of freedom, applied in manipulators, program-controlled manipulators, claw arms, etc., can solve problems such as limited movement capacity of manipulator joints, low load, and low precision of gas-driven control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
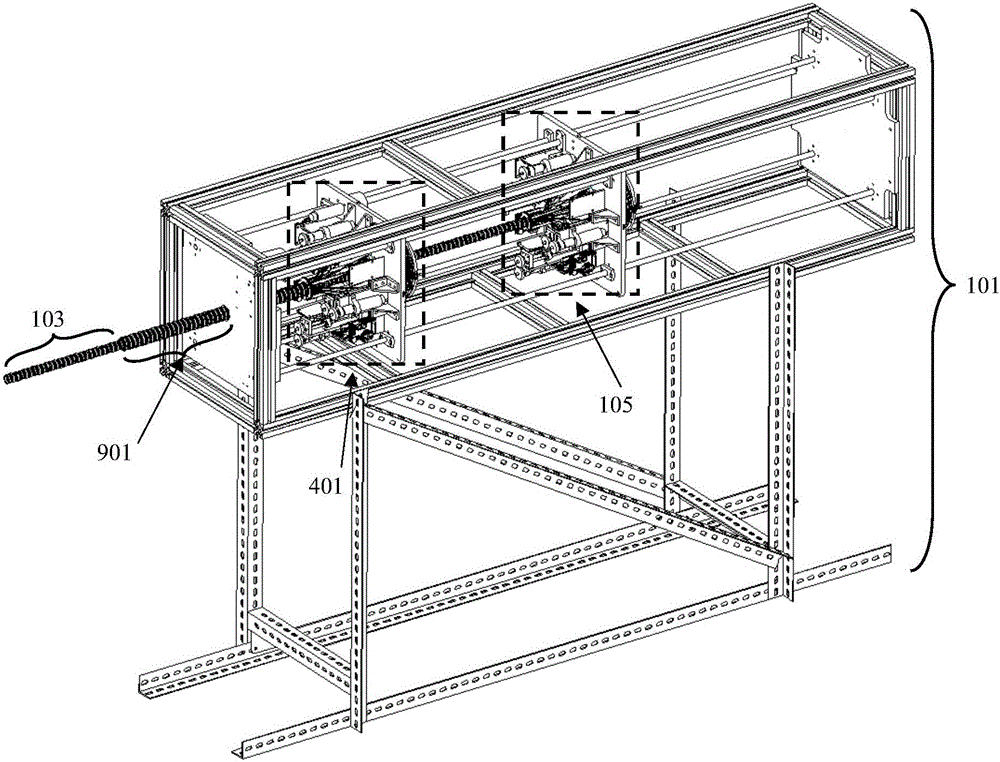
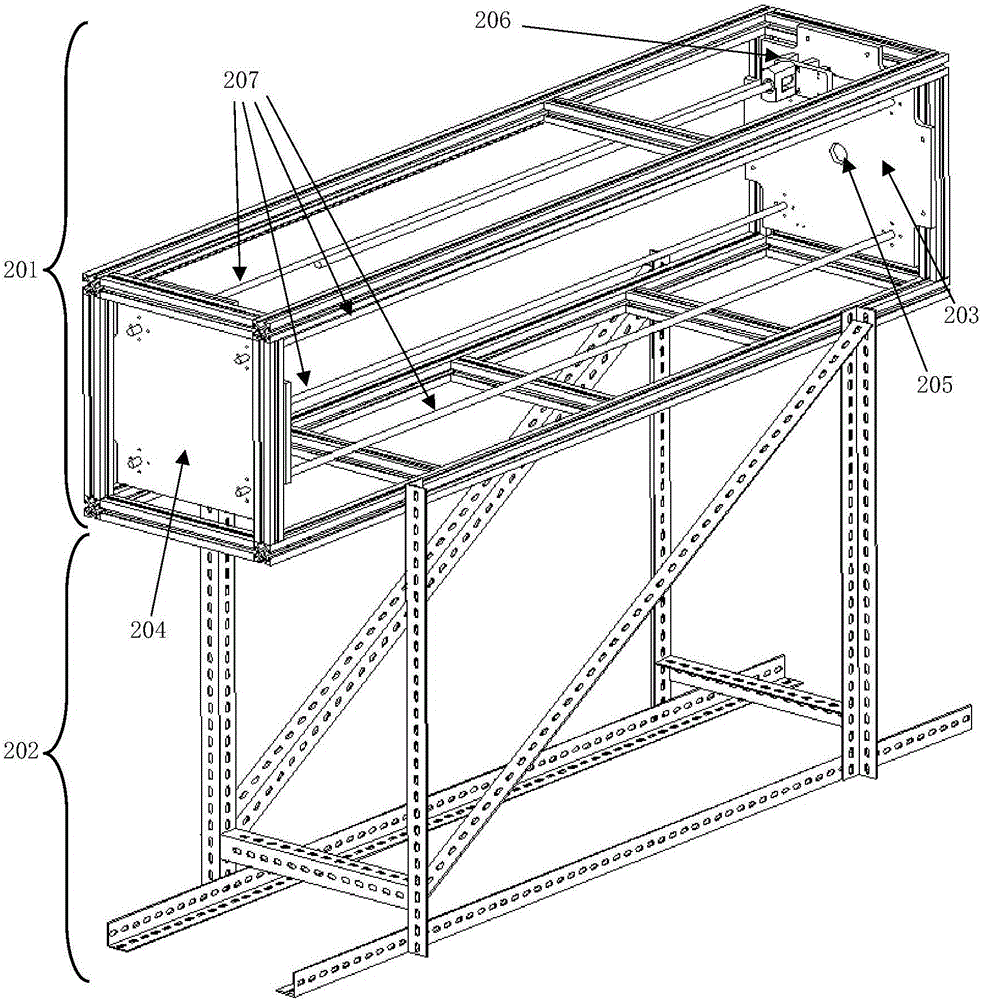
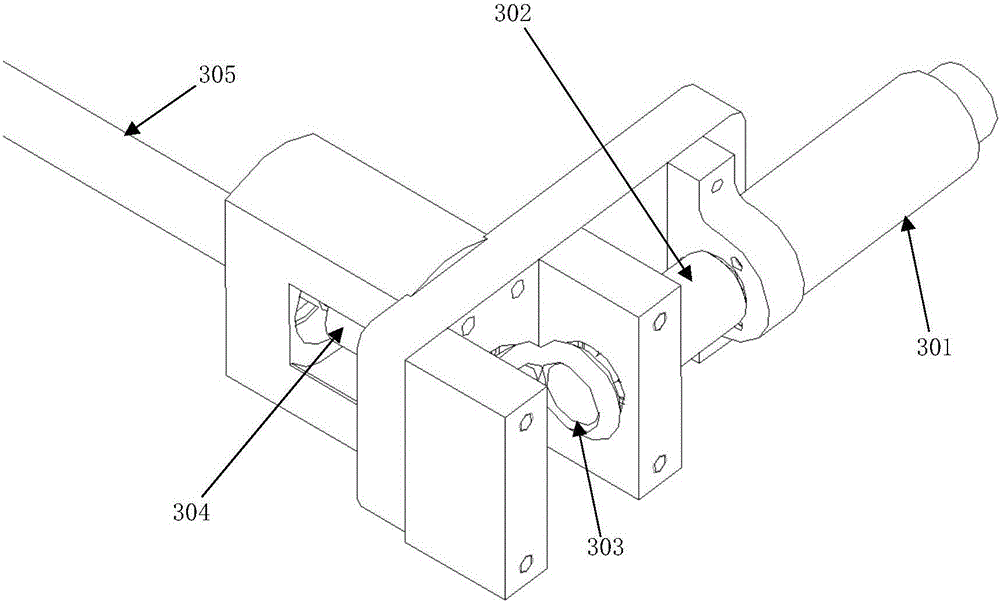
[0028] A modular high-redundancy multi-degree-of-freedom flexible manipulator system consists of multiple manipulator modules with similar structures. The size of each robotic arm module is different, and modular assembly can be realized on the entire flexible robotic arm system, and suitable robotic arm modules can be used for different occasions. The modules of each robotic arm are nested and combined, and can perform relative movement. The single-section manipulator module has 3 degrees of freedom, namely 2 degrees of freedom for bending and 1 degree of freedom for feeding. Then the flexible manipulator system composed of such manipulator modules with N sections will have 3xN degrees of freedom, where N is a natural number greater than 1. When the flexible manipulator system is working, each manipulator module is stretched out step by step, and bending motion can be realized during the stretching process. The flexible manipulator system integrating different end effectors...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More