

Method and equipment for calibrating base coordinate systems of multi-robot system
A basic coordinate system and multi-robot technology, applied in manipulators, manufacturing tools, etc., can solve the problems of expensive precision instruments, expensive instruments and equipment, and no longer applicable, and achieve the effect of simple structure, low cost, and easy replacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
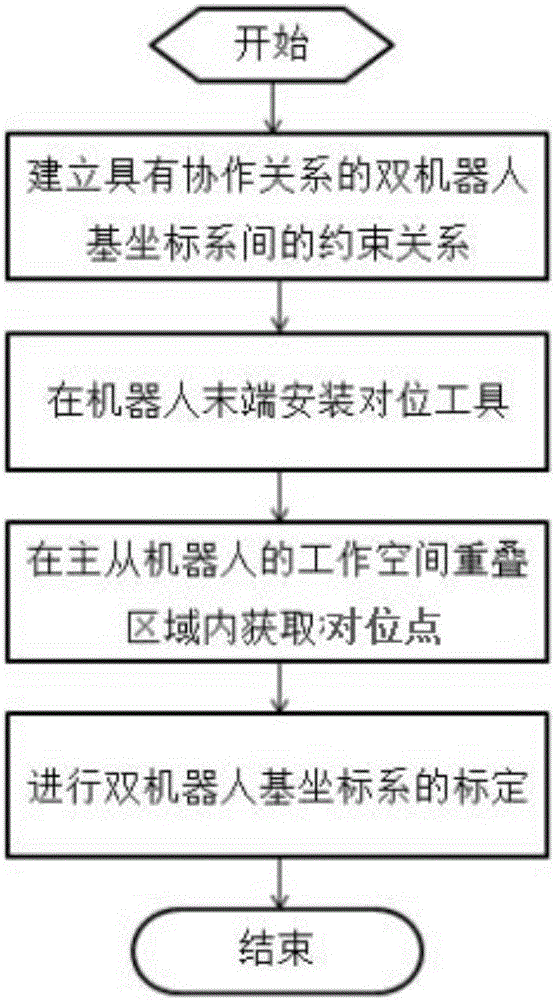
[0034] The invention provides a method for calibrating the base coordinate system of a multi-robot system, the steps are as follows:
[0035] S1. Group two or more robots that have a cooperative relationship with each other according to their cooperative relationship, and establish a constraint relationship between the two robot base coordinate systems for each group of two robots;
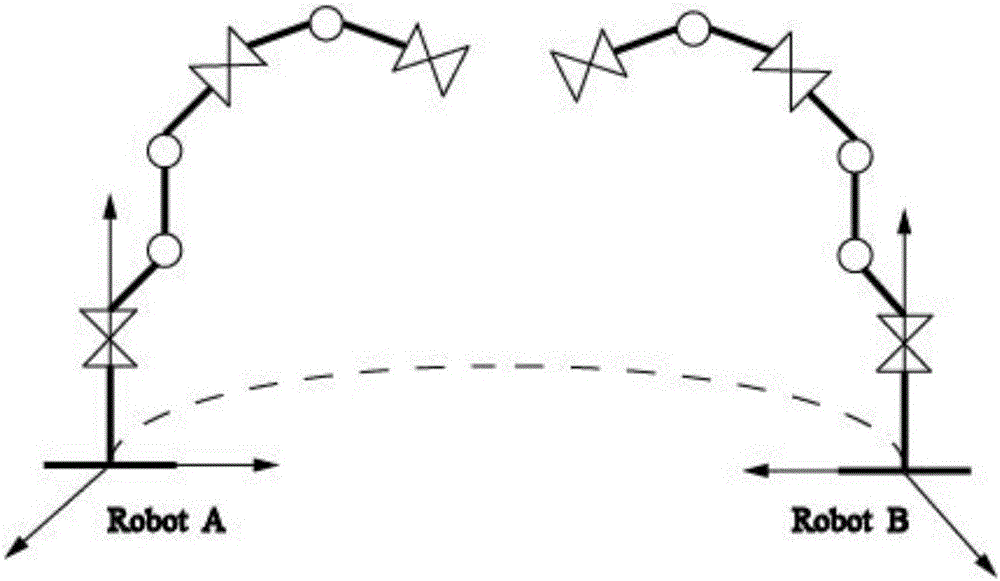
[0036] S2. In one set of dual-robot base coordinate systems established in step S1, set one of the robots as the master robot, whose robot base coordinate system is the master robot base coordinate system, and the other as the slave robot, whose robot base coordinate system is From the robot base coordinate system;
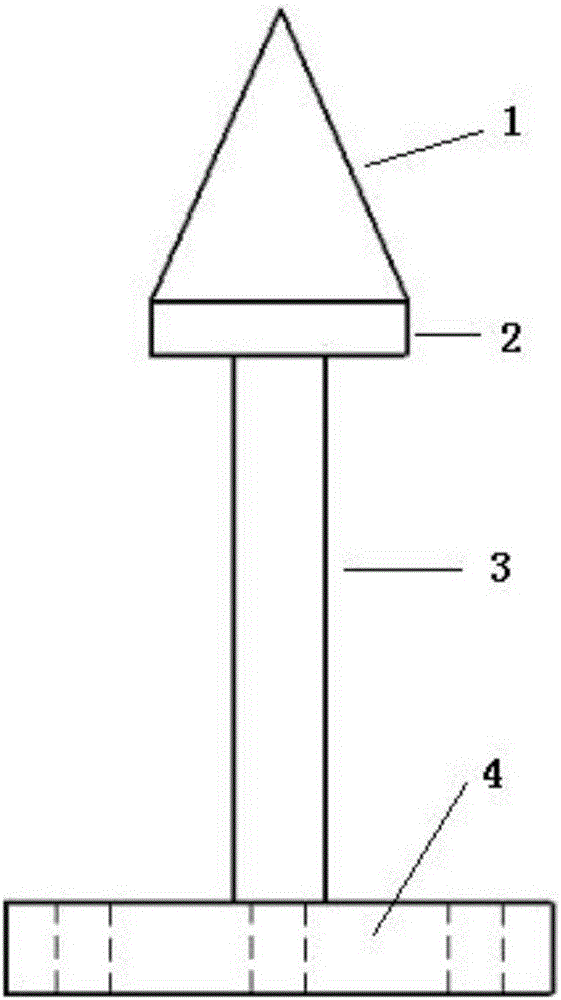
[0037] S3. According to the constraint relationship of the dual-robot base coordinate system established in step S1, use the alignment tool installed at the end of the robot to perform alignment and positioning, and obtain the coordinates of the alignment point in the master robot bas...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More