

Pneumatic muscle and realized driving mechanism thereof
A pneumatic muscle and transmission mechanism technology, applied in the field of bionic muscles, can solve problems such as difficulty in accurately establishing a pneumatic muscle mathematical model, influence of pneumatic muscle position control accuracy, and insignificant effect, so as to reduce hysteresis, reduce friction factors, and improve The effect of accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions of the present invention will be clearly and completely described below in conjunction with the accompanying drawings. Apparently, the described embodiments are some of the embodiments of the present invention, but not all of them. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without making creative efforts belong to the protection scope of the present invention.
[0026] The terms "first", "second", etc. are used for descriptive purposes only and should not be construed as indicating or implying relative importance. In addition, the technical features involved in different embodiments of the present invention described below may be combined with each other as long as they do not constitute a conflict with each other.
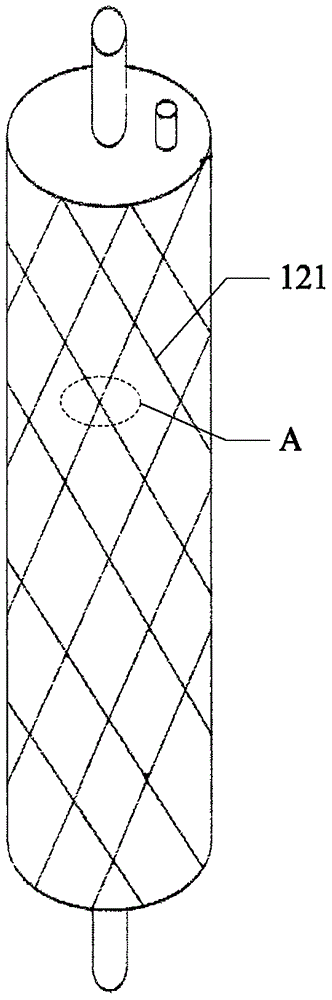
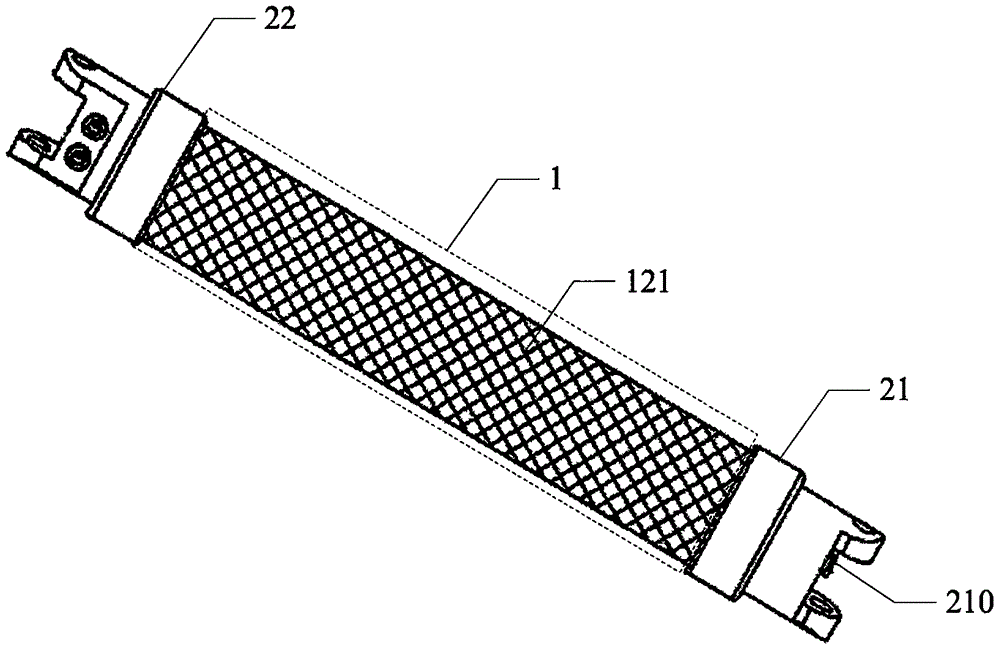
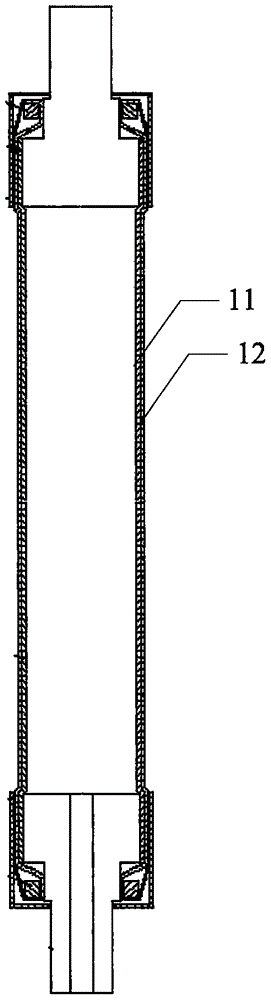
[0027] To facilitate the understanding of those skilled in the art, the idea of the technical solution of this embodiment is firstly described. Please...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More