

Method and system for three-dimensional positioning
A technology for 3D positioning and locating objects, applied in the field of 3D positioning, can solve the problems of high cost and difficult promotion, and achieve the effect of low cost and good immersion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach 1
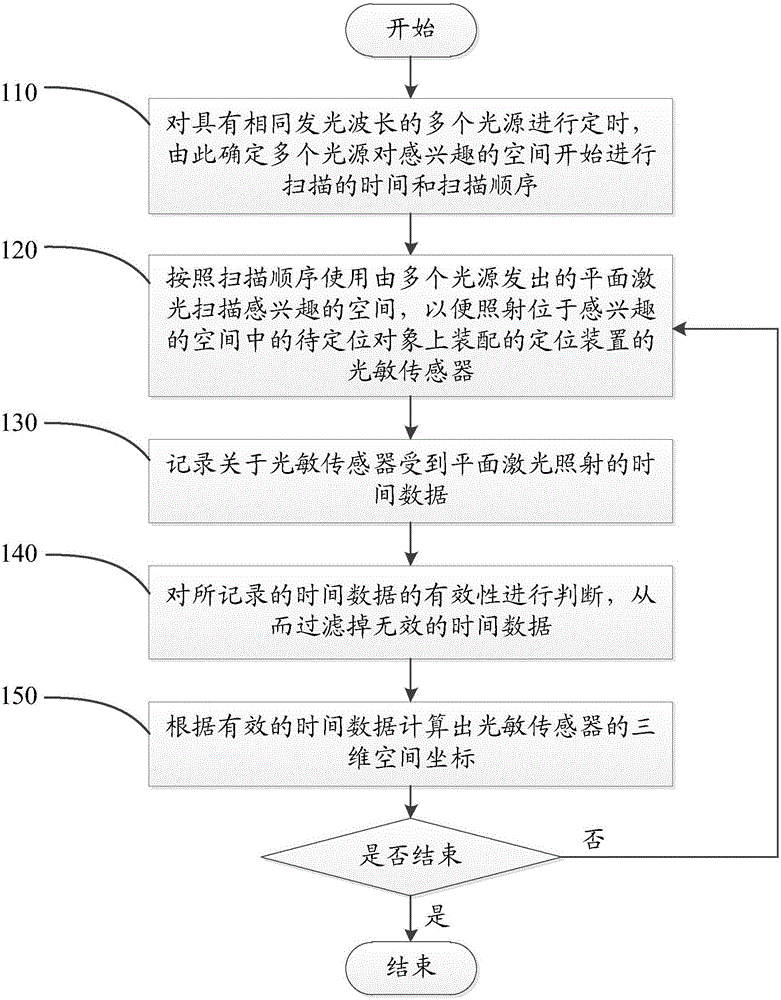
[0056] The first embodiment of the present application provides a three-dimensional positioning method for three-dimensional positioning of an object to be positioned in a space of interest, wherein the three-dimensional space coordinates and direction of the object to be positioned pass through a positioning device assembled on the object to be positioned The three-dimensional space coordinates of the photosensitive sensor to reflect. Specifically, the implementation flow diagram of the three-dimensional positioning method provided in Embodiment 1 is as follows: figure 1 As shown, including the following steps:
[0057] Step 110, to have the same emission wavelength λ 0 Multiple light sources Q 1 …Q m Time to check the time to determine multiple light sources Q 1 …Q m Scan time and scan sequence of the space of interest;
[0058] Step 120, using multiple light sources Q according to the scanning order 1 …Q m Plane laser L 1 …L m Scan the space of interest to illuminate the photos...
Embodiment approach 2
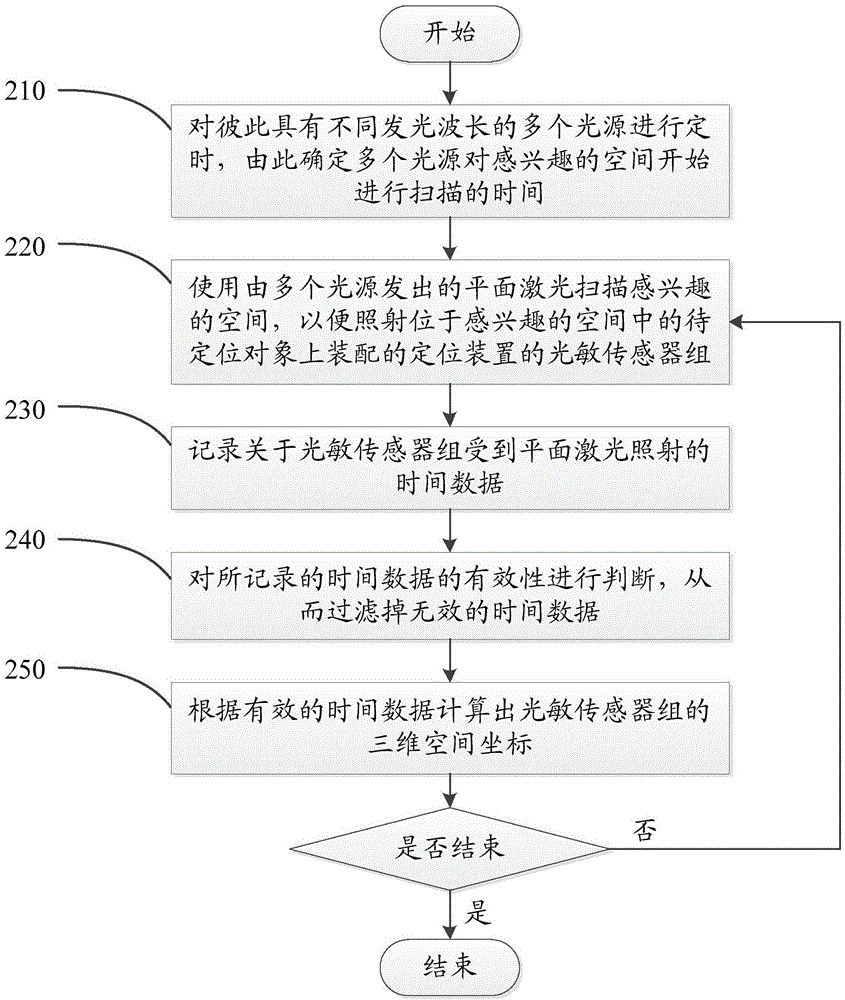
[0081] Embodiment 2 of the present application also provides a three-dimensional positioning method for performing three-dimensional positioning of an object to be positioned in a space of interest, wherein the three-dimensional space coordinates and direction of the object to be positioned are determined by the assembly on the object to be positioned. N photosensitive sensor groups of the device (S 11 …S 1m ), (S 21 …S 2m )...(S n1 …S nm ) To reflect the three-dimensional space coordinates, and one of the photosensitive sensor groups (S i1 …S im ) Includes multiple (e.g. m) photosensitive sensors installed together S i1 , S i2 …S im (Where i is an integer between 1 and m) is used to respond to multiple lasers with different wavelengths. Specifically, the implementation flow diagram of the three-dimensional positioning method provided in Embodiment 2 is as follows: image 3 As shown, including the following steps:
[0082] Step 210, the pairs have different emission wavelengths...
Embodiment approach 3
[0093] Embodiment 3 of the present application provides a three-dimensional positioning system for performing three-dimensional positioning of an object to be positioned in a space of interest, wherein the three-dimensional space coordinates and direction of the object to be positioned pass a photosensitive sensor assembled on the object to be positioned The three-dimensional space coordinates to reflect. Specifically, the three-dimensional positioning system provided in the third embodiment is such as Figure 4 As shown, the three-dimensional positioning system includes:
[0094] Multiple laser base stations P 1 …P m , The laser light it emits has the same emission wavelength λ 0 , Each of the multiple laser base stations has a timing control module, a planar laser source and a rotating device,
[0095] The timing control module receives the timing signal and controls the start time and sequence of the rotating device according to the timing signal,
[0096] The planar laser source...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More