

Task intensity dynamic adjustment based multiple robots cooperating task hunting allocation algorithm
A multi-robot and task distribution technology, applied in the direction of instruments, motor vehicles, non-electric variable control, etc., can solve problems such as the difficulty of optimal distribution of multi-robot systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
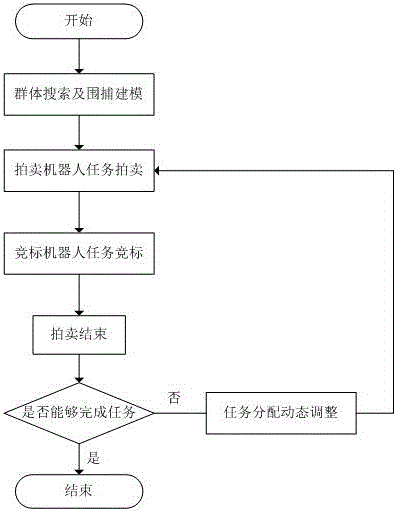
[0045] Embodiment one: see figure 1 , a multi-robot cooperative round-up task assignment method based on dynamic adjustment of task intensity, which specifically includes the following steps: 1) group search and round-up modeling, 2) task assignment strategy.
Embodiment 2
[0046] Embodiment two: this example is basically the same as embodiment one, and the special features are as follows:
[0047] Step 1) Group search and round-up modeling is:
[0048] (1) Group search method:
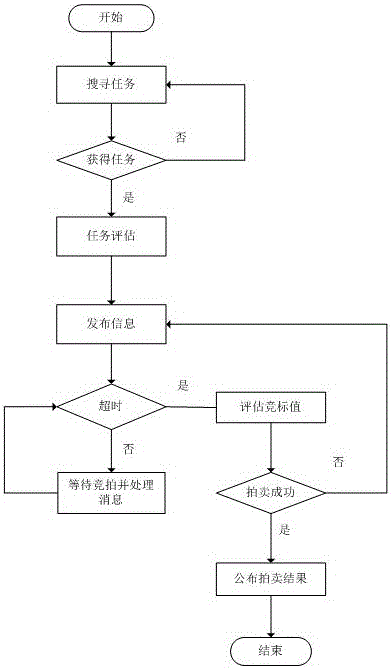
[0049] The group search strategy adopted is the multi-robot roaming method, that is, the round-up robot walks randomly in the multi-robot collaborative system environment; the multi-robots using the roaming method do not communicate before finding the target robot to reduce the communication burden. ;When a hunting robot finds a target robot, the hunting robot switches to the role of auction robot according to the algorithm, evaluates the hunting task of the target robot, creates a temporary auction market, releases the task of rounding up the target robot and hunts down the target Robot; the siege robot that receives the information becomes a bidding robot and evaluates the task to decide whether to bid for the siege task;
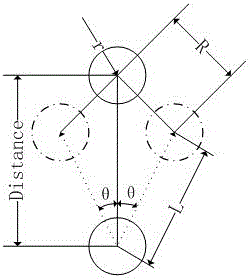
[0050] (2) Roundup modeling:
[0051] Such...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More