

Dynamic adaptive stability control system for mobile robot
A dynamic self-adaptive, mobile robot technology, applied in the control/adjustment system, attitude control, non-electric variable control and other directions, can solve the problems of adjusting the robot, time-consuming, reducing the working efficiency of the robot, etc., to achieve the effect of ensuring dynamic stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] In order to enable those skilled in the art to better understand the solutions of the present invention, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention.
[0023] It is considered an effective control method to apply the concept of zero-moment point stability control in the stability control system of mobile robots and apply it to the attitude dynamic stability control of mobile robots.
[0024] For mobile robots, zero-moment point control can also be applied to stabilize the attitude of the system during mobile manipulation. The adjustable zero-moment point area control method can help the mobile robot system to achieve adaptive dynamic stability control during manipulation.
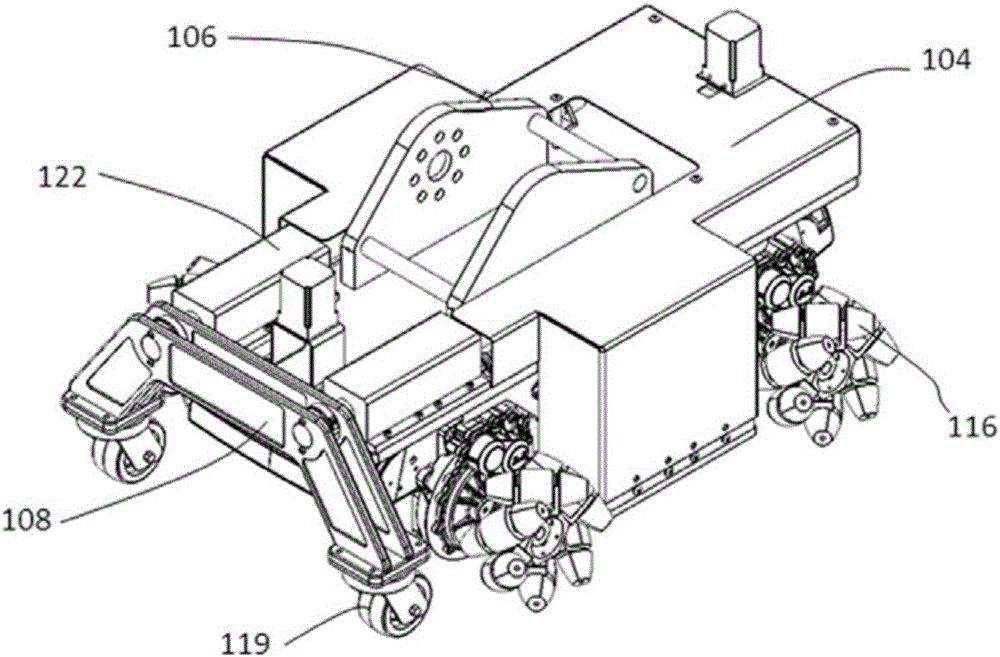
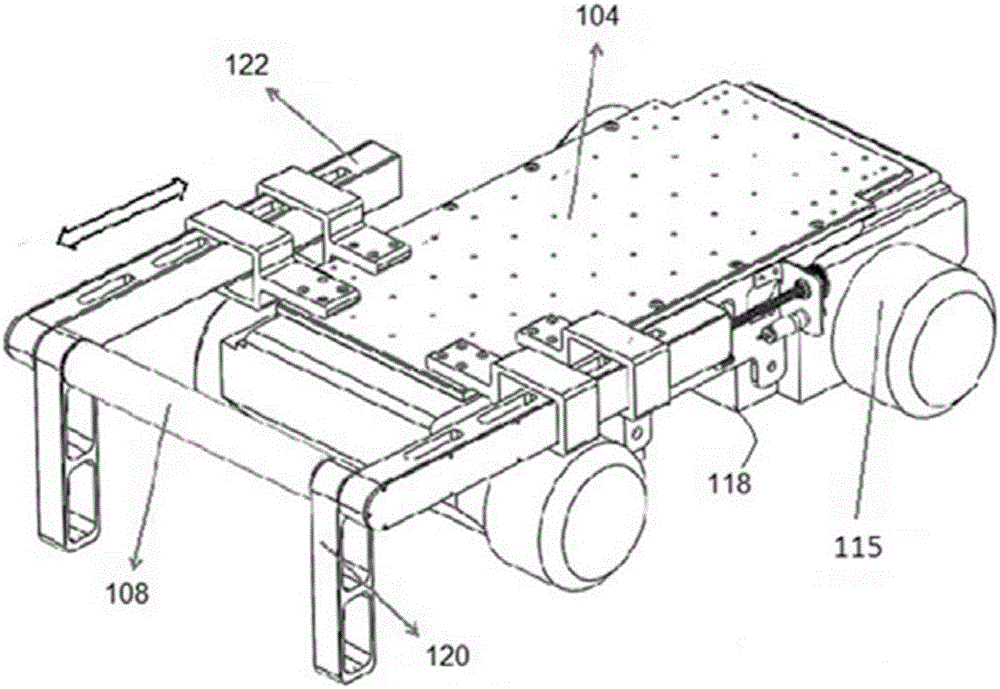
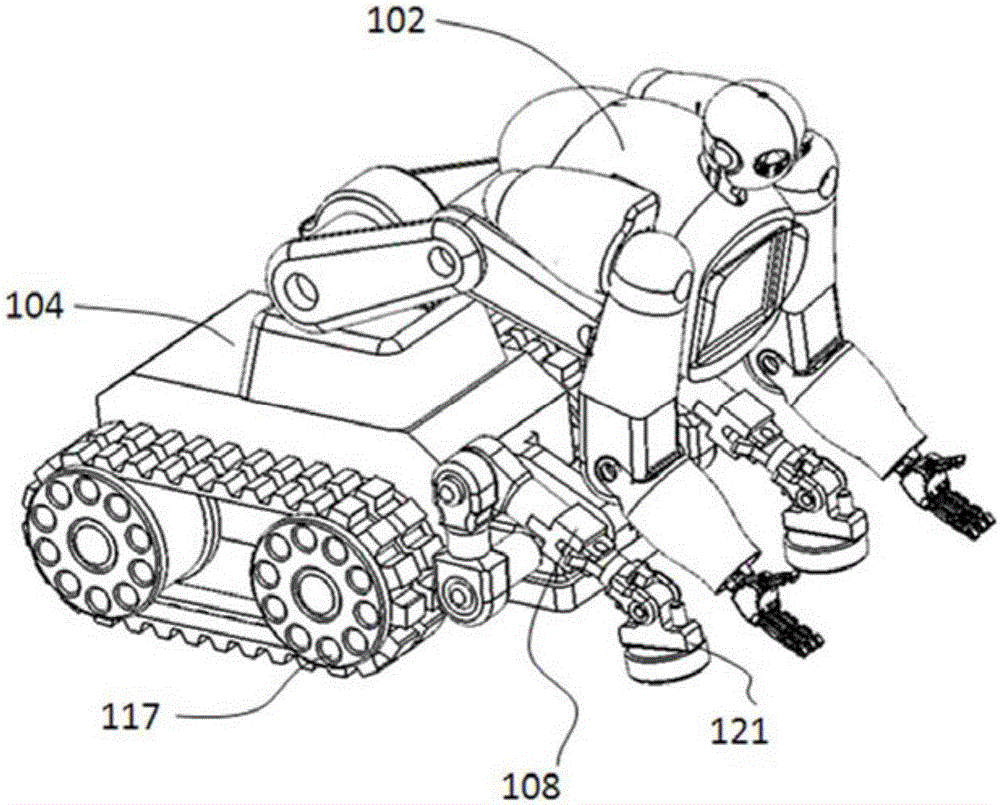
[0025] As shown in Figures 1-4, a dynamic adaptive stability control system for a mobile robot includes a mobile platform 104, a connecting device 106, a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More