Robot vision navigation technology based on feature recognition
A technology of robot vision and robot, which is applied in the field of double walking, can solve the problem of not being able to accurately locate the coordinates of one's own position, and achieve the effect of precise positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
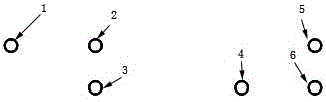
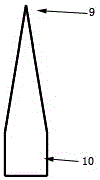
[0022] (11) The image emitting device adopts high-brightness LED light source, and the pattern is made of opaque metal material to produce figure 1 , the via holes of the three mark points on the left are used as light spots, using the principle of lens imaging to focus, and a blue filter is added to the outside of the lens to project onto the top of the room.
[0023] The floor-sweeping (mopping) robot continuously takes pictures of the top of the room through the camera (13), obtains the image of the top of the room, and then compares the two-dimensional matrix pixels of the obtained top image to find out the color projected by the blue filter. According to the pixels found, calculate the distance between the three pixels, find out the direction marker point (1), and finally calculate the angles between (1), (2) and (2), (3) to determine the marker The serial number of the pattern (here, because only one logo pattern is set, and the indoor space is large, multiple pattern si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com