

A speed measurement method of six-axis industrial robot based on fpga
An industrial robot, six-axis technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of speed measurement error, consume large LE resources, and inconvenient speed measurement, and achieve the effect of improving measurement accuracy and saving logic resources
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
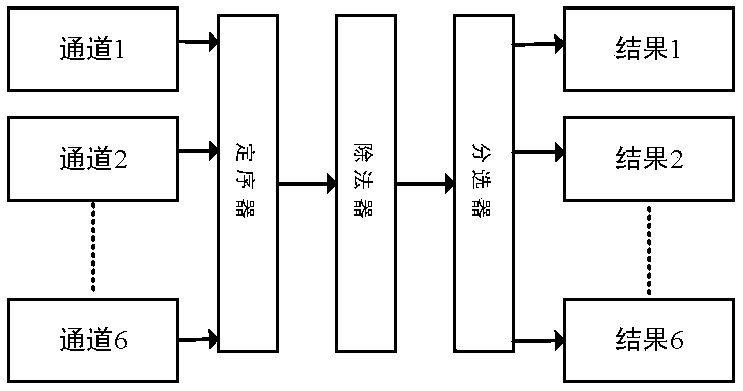
[0015] An FPGA-based method for measuring the speed of a six-axis industrial robot includes two parts: the realization step of the motor speed measurement method and the realization step of a multi-channel divider. The motor speed measurement implementation steps include:
[0016] Step 1: Motor Speed Measurement
[0017] ①If there are M pulses in the 50μs timer, M≥2, and the time from the rising edge of the first pulse to the rising edge of the M pulse is T, then the speed=M*pulse equivalent / T; ②If The pulse number M that appears in the 50μs timer, M≤1, then continue to wait; ③If two pulses appear outside the 50μs timer, and the time between the captured two pulses is T, then the speed = pulse equivalent / T ; ④ If a pulse or zero pulse appears outside the 50μs timer, it is considered that the speed at this time is 0; ① and ③ achieved by the motor speed measurement have 1 / T, if each axis uses a divider , need to consume a lot of LE resources, in order to realize multi-axis l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More