Six-axis industrial robot speed measuring method based on FPGA
An industrial robot, six-axis technology, applied in manipulators, manufacturing tools, program-controlled manipulators, etc., can solve the problems of speed measurement error, consumption of large LE resources, inconvenient speed measurement, etc., to improve measurement accuracy and save logic resources.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
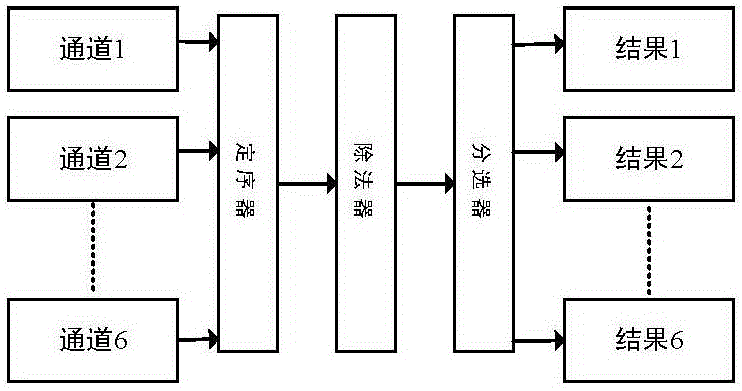
[0015] An FPGA-based method for measuring the speed of a six-axis industrial robot includes two parts: the realization step of the motor speed measurement method and the realization step of a multi-channel divider. The motor speed measurement implementation steps include:
[0016] Step 1: Motor Speed Measurement
[0017] ①If there are M pulses in the 50us timer, M≥2, and the time from the rising edge of the first pulse to the rising edge of the M pulse is T, then the speed=M*pulse equivalent / T; ②If If the number of pulses M appears in the 50us timer, if M≤1, continue to wait; ③If two pulses appear outside the 50us timer, and the time between the two pulses is T, then the speed = pulse equivalent / T ; ④ If a pulse or zero pulse appears outside the 50us timer, the speed at this time is considered to be 0; ① and ③ achieved by the motor speed measurement have 1 / T, if each axis uses a divider , need to consume a lot of LE resources, in order to realize multi-axis logic sharing t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More