

Laser-radar automatic calibration method and device thereof
A technology of laser radar and calibration method, applied in the field of unmanned vehicle navigation, can solve problems such as autonomous positioning of unmanned vehicle radar, and achieve the effect of improving the recognition degree of scanning images and improving the accuracy rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
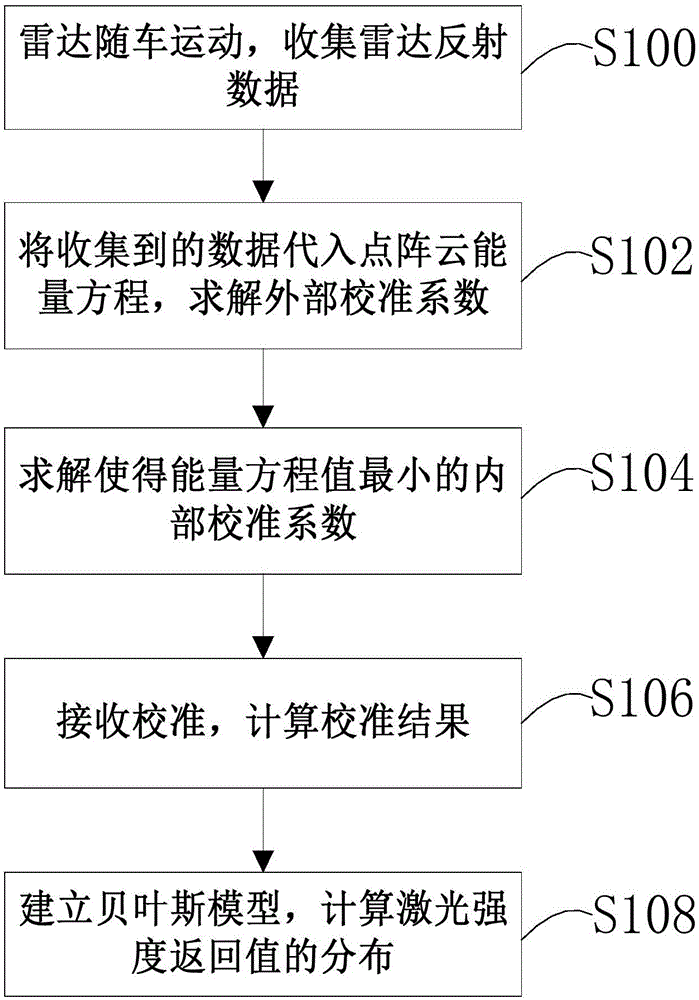
[0048] In order to explain in detail the technical content, structural features, achieved goals and effects of the technical solution, the following will be described in detail in conjunction with specific embodiments and accompanying drawings.
[0049] 1. General idea
[0050] The present invention proposes a brand-new method for automatically calibrating the internal parameters and external parameters of multi-beam laser radar (in this paper, Velodyne HD 64-E laser radar is taken as an example, but it is used for any line-scanning laser radar), and the process No specific calibration targets or manual measurements are used in the test. After the laser radar is loaded on an unmanned vehicle, coupled with the readings of the inertial measurement unit, our algorithm does not need map assistance, only the readings of any surrounding environment scanned by the machine within a few seconds, can Can calculate hundreds of lidar sensor parameters.
[0051] The present invention is ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More