

Automatic navigation control method of agricultural machine
A technology of agricultural machinery and control method, applied in two-dimensional position/channel control and other directions, can solve problems such as weak anti-interference ability, difficulty in establishing agricultural machinery kinematics and dynamics models, and difficulty in ensuring steady-state accuracy of path tracking.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] In order to make the present invention more comprehensible, an embodiment is used for further detailed description, but it is not used to limit the scope of the present invention.
[0060] A method for automatic navigation control of agricultural machinery, the method comprising the steps of:
[0061] (1) Real-time measurement of the movement state data of the agricultural machinery at the current moment through the GPS receiver;
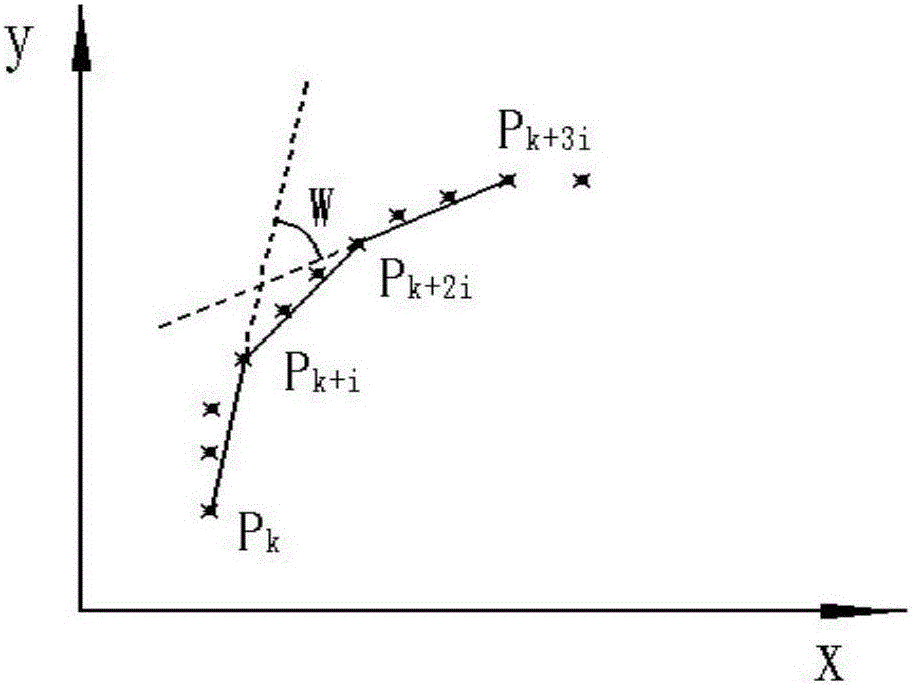
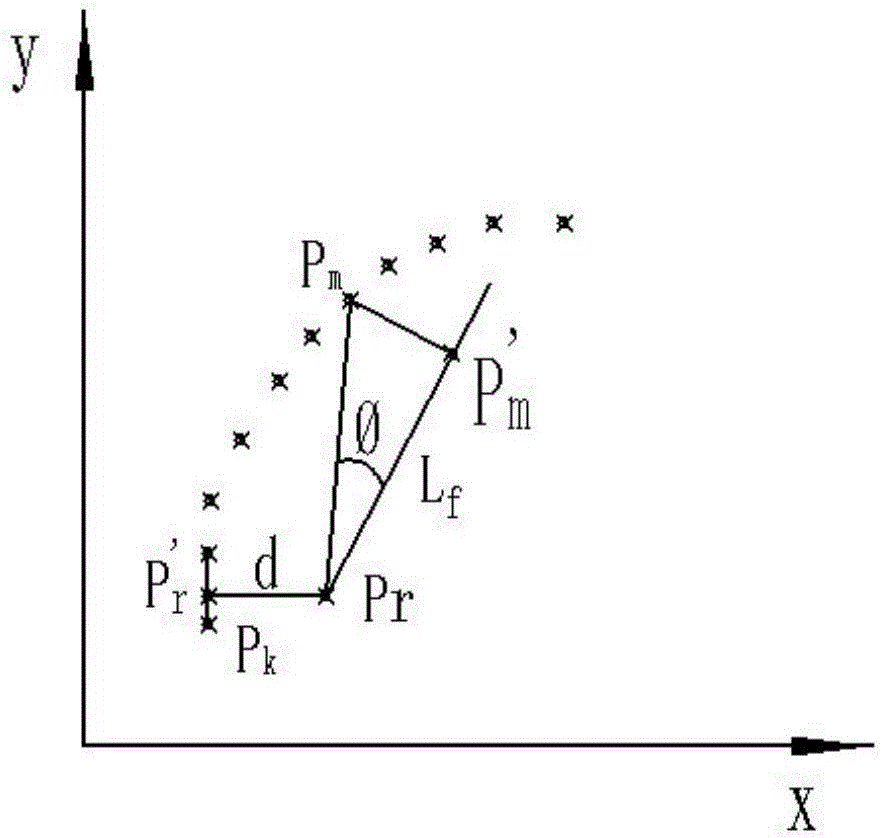
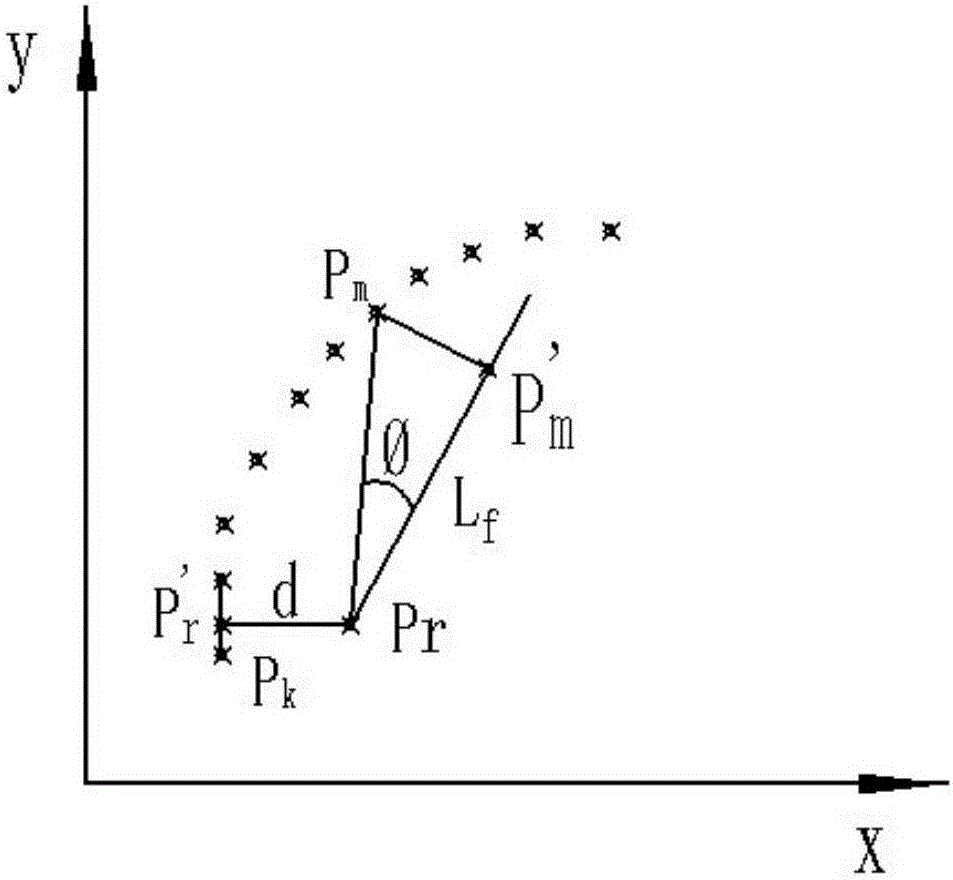
[0062] (2) Use the preview control method to dynamically search for the target point, compare and analyze the motion state data obtained in step 1 with the predefined path data, and calculate the lateral deviation and heading deviation;
[0063] (3) The lateral deviation and heading deviation obtained in step 2 are fuzzified by the fuzzy control algorithm, and then the fuzzy quantity is imported into the fuzzy controller to obtain the front wheel angle; the geometric model is established by the improved pure tracking algorithm, so that the T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More