

UAV (unmanned aerial vehicle) as well as UAV landing control method and device
A control device and control method technology, applied in the field of drones, can solve problems such as complex operation of drones and poor user experience, and achieve the effect of improving user experience and simplifying landing operations
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
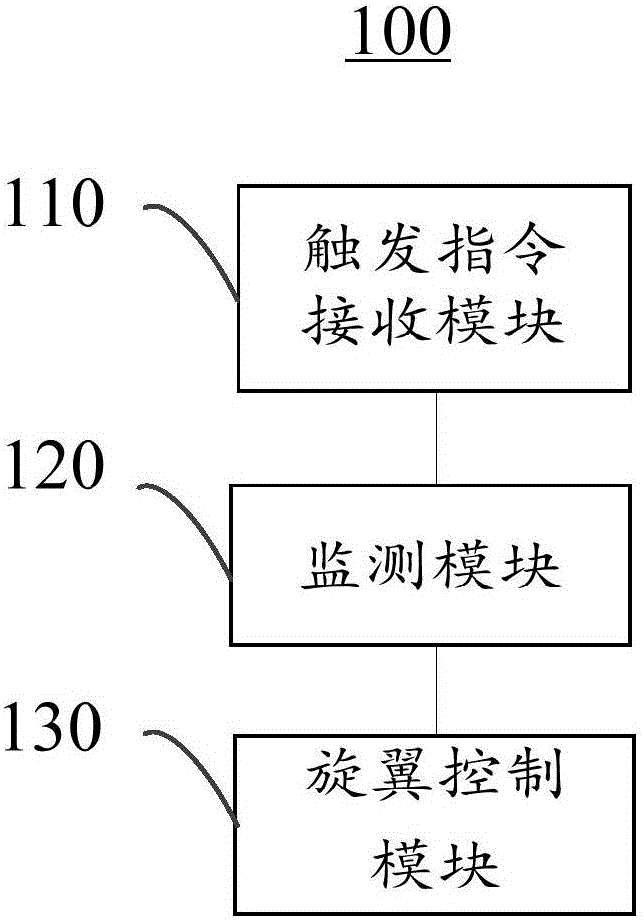
[0019] figure 2 It shows a schematic diagram of a UAV landing control device 100 provided by an embodiment of the present invention. The UAV landing control device 100 of the present invention includes: a trigger command receiving module 110 , a monitoring module 120 and a rotor control module 130 .
[0020] The trigger instruction receiving module 110 is used for receiving a trigger instruction.
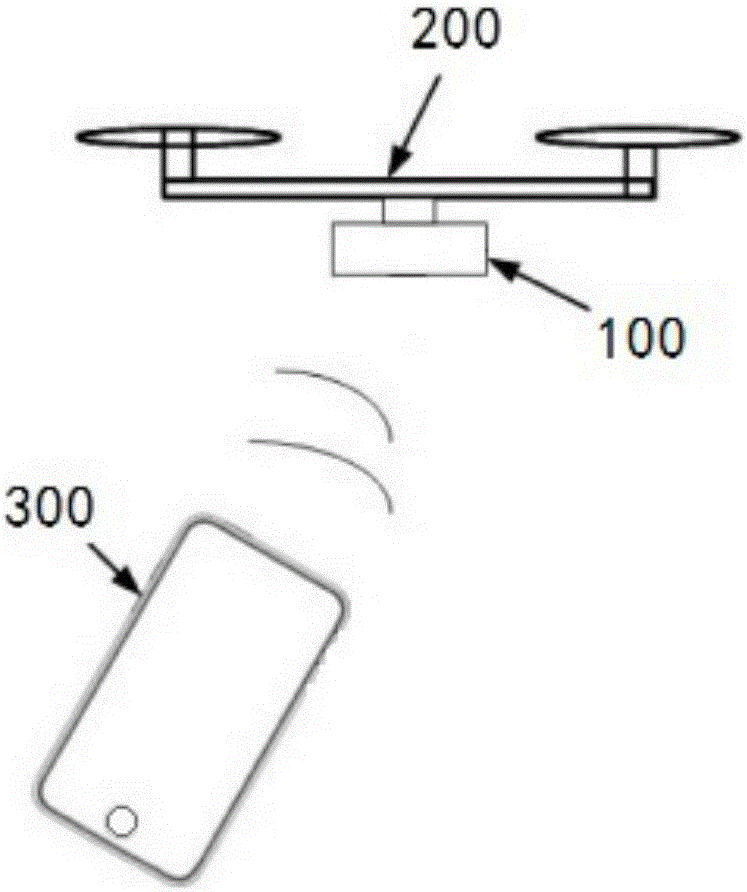
[0021] In the embodiment of the present invention, the UAV 200 can be placed at a predetermined position at a preset landing height. Height, such as the height level with the top of the user's head, the height of 2 meters from the ground, etc., and the UAV 200 can be controlled to be in a hovering state, so as to prepare for landing.
[0022] Then the user sends a trigger command to the UAV 200, and the trigger command is an instruction to make the UAV 200 enter a landing preparation state. The trigger instruction can be triggered by a button on the remote control terminal 300 or...
no. 2 example
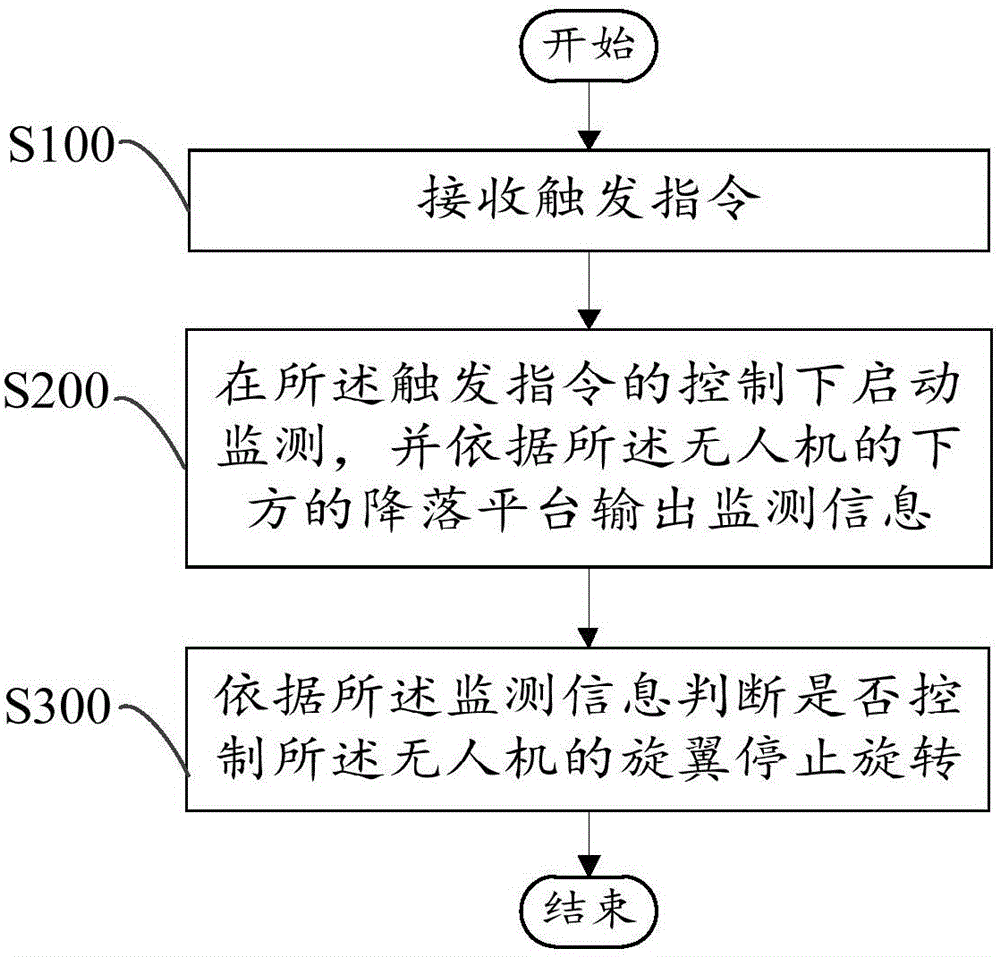
[0045] Figure 3 to Figure 7 A schematic diagram of a drone landing control method provided by an embodiment of the present invention is shown. see image 3 , the drone landing control method that the embodiment of the present invention provides comprises the following steps:
[0046] Step S100, receiving a trigger instruction.
[0047] In the embodiment of the present invention, step S100 may be executed by the trigger instruction receiving module 110 . The user sends a trigger instruction to the UAV 200, and the trigger instruction is an instruction to make the UAV 200 enter a landing preparation state. The trigger instruction can be triggered by a button on the remote control terminal 300 or input by means of voice control, gesture, etc. The present invention does not limit the input method of the trigger instruction. For the trigger instruction inputted by pressing the button, the user activates the button, and the instruction is sent to the UAV 200 in the form of a si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More