

Automatic retraction method for parachute landing unmanned aerial vehicle
A recovery method and unmanned aerial vehicle technology, applied in the field of unmanned aerial vehicles, can solve the problems of difficulty in adapting to the requirements of parachute landing, difficulty in adapting, and high skill requirements of operators, so as to save the demand for wind measuring equipment and personnel, and improve the recovery accuracy Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0023] The present invention will be further described below in conjunction with the accompanying drawings and embodiments, and the present invention includes but not limited to the following embodiments.
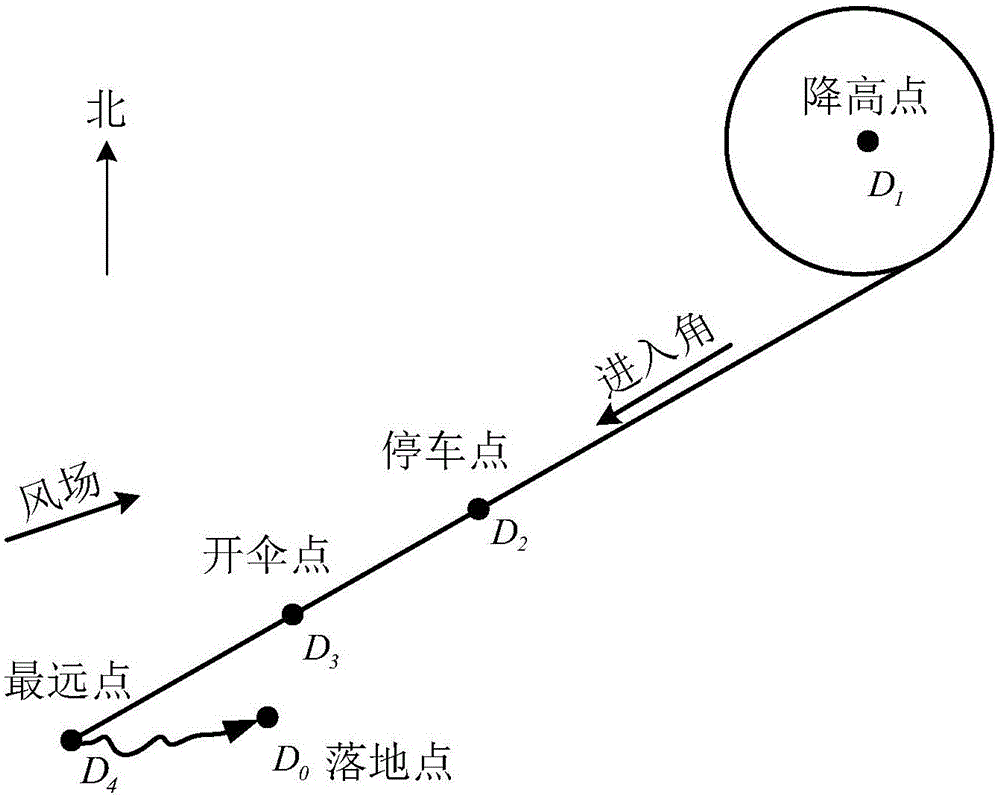
[0024] The steps of the method involved in the present invention are as follows: manually select the landing site, the entry angle and the recovery height (the absolute height of the parking point from the ground), and send them to the unmanned aerial vehicle; the unmanned aerial vehicle automatically plans and executes the recovery route; when approaching the recovery point, The movement after the engine stops is divided into taxiing section, pulling stop section, and drifting section. The flight control program automatically inquires the weight, speed, altitude, wind field and other conditions of the drone at that time, and calculates the parking and parachute positions; autonomously executes parking , Open the umbrella command. Specifically include the following steps: ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More