

Method and device for handling with task planning and execution exception of mobile robot
A mobile robot, task planning technology, applied in machine execution devices, electrical digital data processing, instruments, etc., can solve problems such as planning failure, safety hazards, behavior execution failure, etc., and achieve the effect of improving robustness and robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further elaborated below in conjunction with the accompanying drawings and specific embodiments.
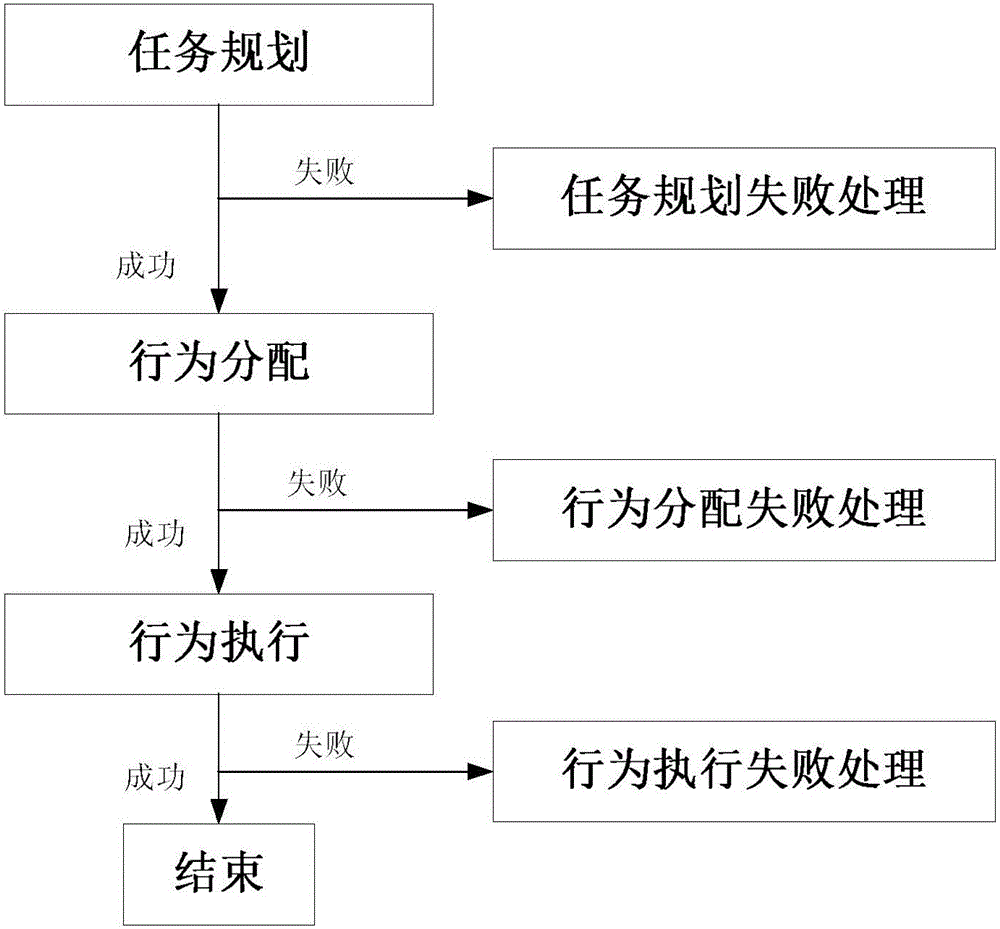
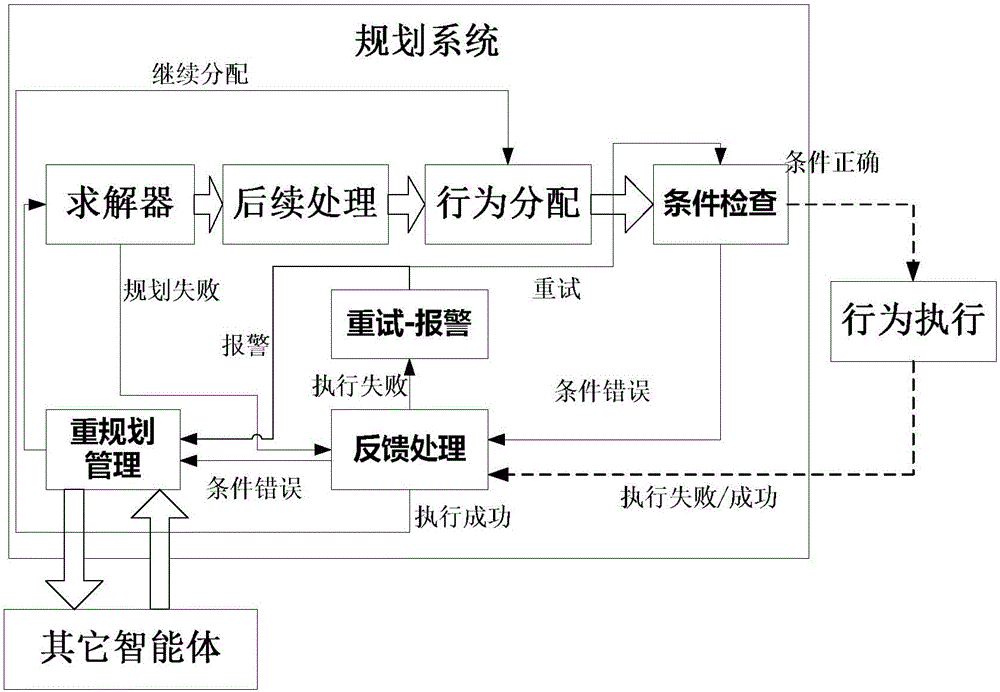
[0032] The present invention provides a mobile robot task planning and execution abnormal situation processing method, such as figure 1 , see the specific process of the system figure 2 . Such as figure 1 As shown, the system operation process can be divided into three main processes: task planning, behavior allocation and behavior execution. Among them, the task planning unit mainly solves the modeling planning problem, and then the behavior allocation unit sequentially allocates the planning results, and the behavior execution unit is the specific implementer. Corresponding to the three main processes, there are situations that may lead to abnormal operation of the system, namely, planning failure during the task planning period, allocation failure during the behavior allocation period, and execution failure during the behavior execution...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More