

An energy-saving multi-rotor UAV device based on bionic suspension
A multi-rotor unmanned aerial vehicle, unmanned aerial vehicle technology, applied in the direction of rotorcraft, unmanned aerial vehicle, motor vehicle, etc., can solve the problems of power consumption, hovering function failure, unsuitable use, etc., and achieves broad application prospects, The effect of simple recovery device and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
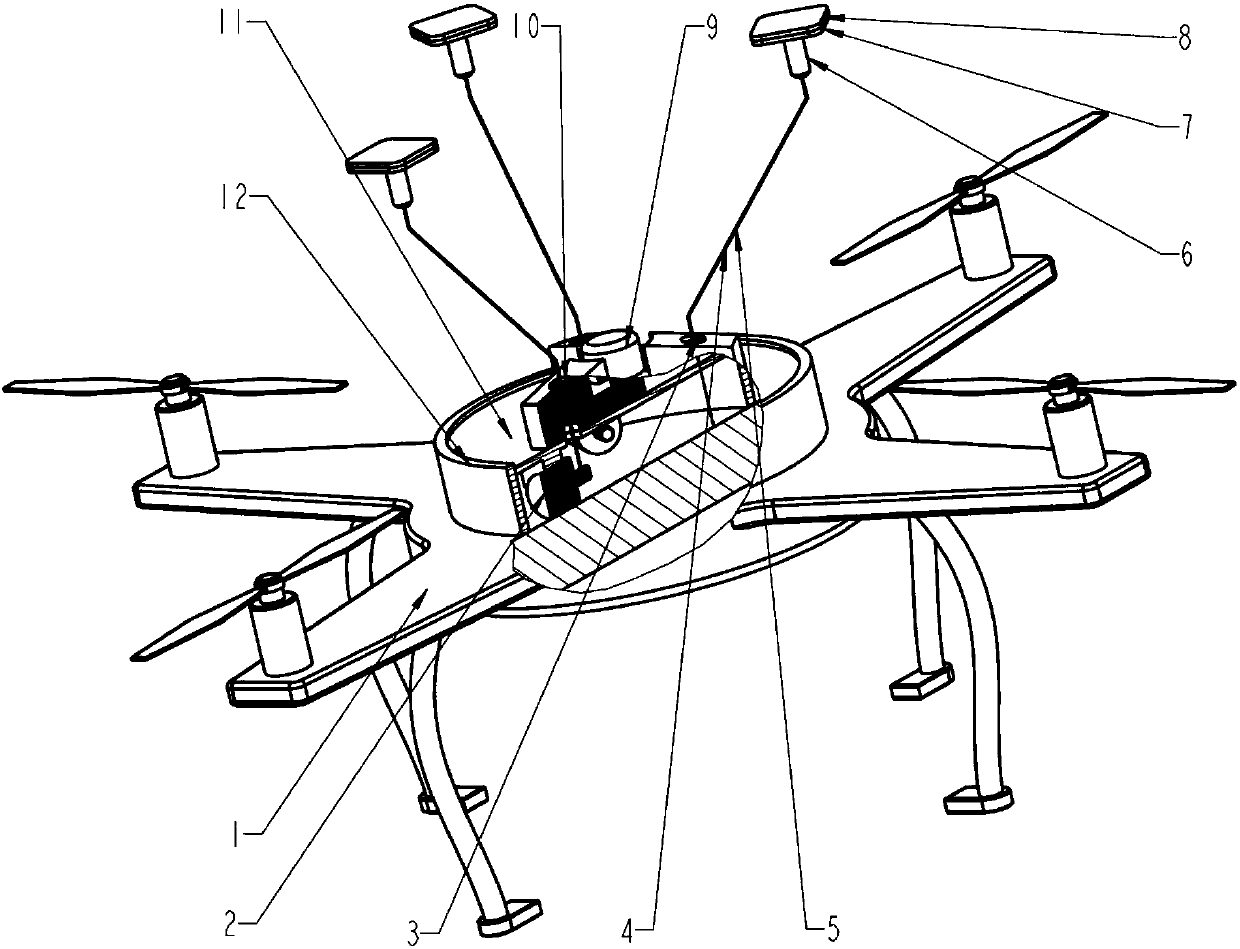
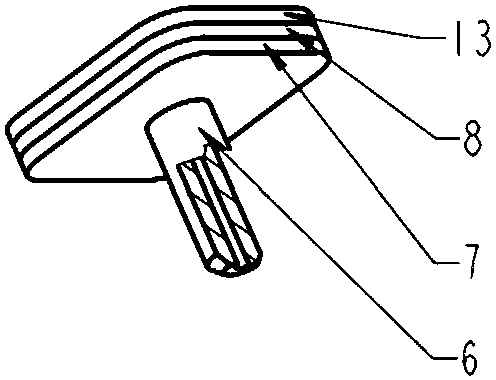
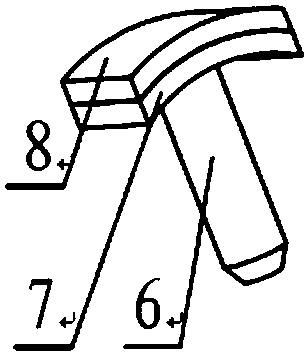
[0024] like figure 1 , the present embodiment includes a multi-rotor drone 1, a stepper motor 2, a launch chamber 3, a hollow rope 4, a wire 5, a launch rod 6, a piezoelectric sheet 7, an imitation gecko foot 8, a pan-tilt camera 9, and a launch coil 10 1. Install the flat panel 11 and the installation box 12, the installation box 12 is divided into upper and lower layers by the installation flat panel 11, and three emission chambers 3 are evenly distributed on the upper side of the installation flat panel, and one group of emission coils 10 is fixed in each emission cavity 3, There is a pan-tilt camera 9 in the center; three stepper motors 2 are evenly distributed in the middle of the lower side of the installation plate, and the shaft of the stepper motor 2 is wound with a hollow rope 4, which is connected to the bottom end of the launch rod 6 through the launch cavity 3 , and connected to the piezoelectric sheet 7 through the launch rod 6, the launch rod 6 is hollow. The h...
Embodiment 2
[0033] The difference between embodiment 2 and embodiment 1 is that embodiment 2 replaces the hollow rope with the common mechanical arm structure in the prior art. The mechanical arm can adopt a multi-bending structure, and a piezoelectric The piezoelectric sheet is provided with imitation gecko feet, and the surface of the imitation gecko feet is provided with bristle arrays. The control device controls the lifting of the mechanical arm structure, and the piezoelectric sheet controls the imitation gecko feet. The principle of the control device is the same as that of Embodiment 1.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More