

Co-localization method of underwater moving target under asynchronous clock
A technology of moving targets and collaborative positioning, applied in positioning, instruments, measuring devices, etc., can solve problems such as positioning result errors, difficult node positioning, and complex implementation processes, and achieve the effects of reducing impact, overcoming clock asynchrony, and getting rid of dependence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
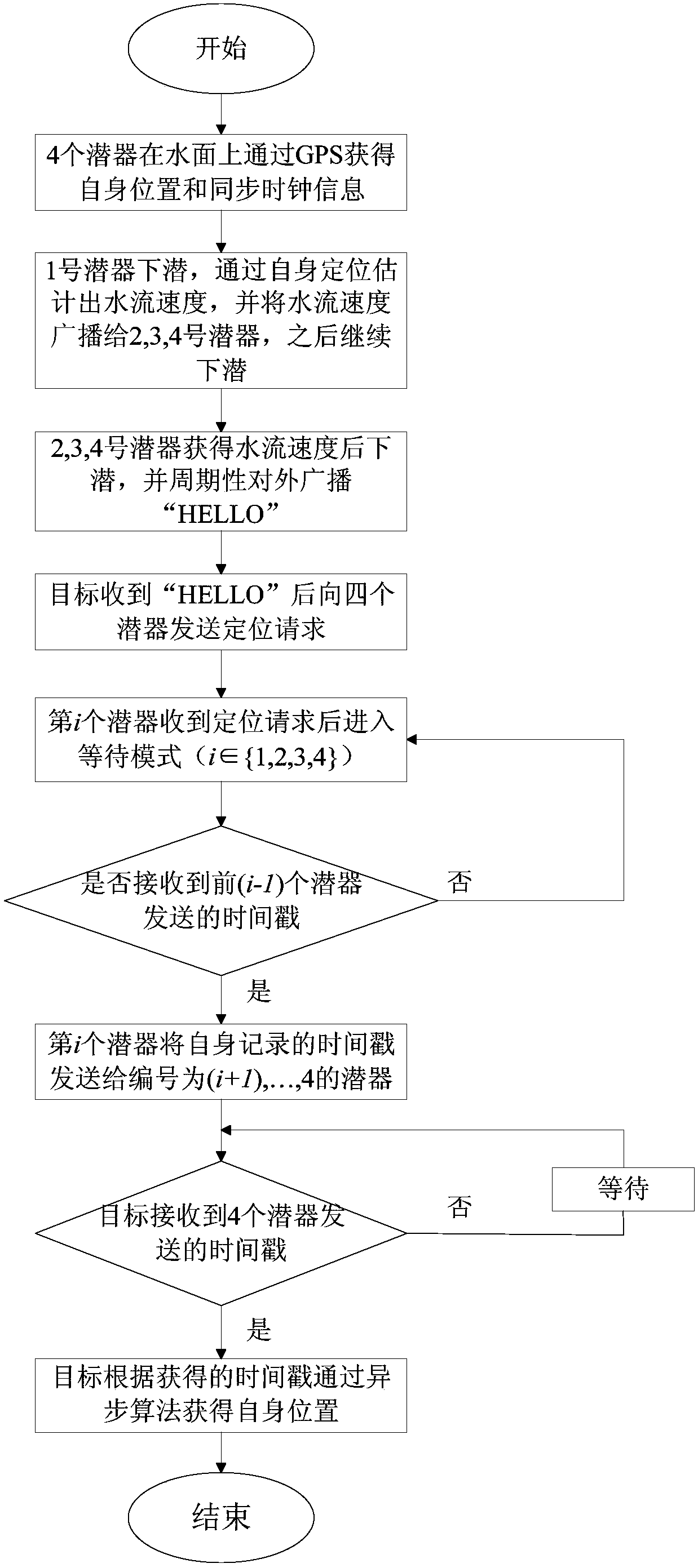
[0057] Embodiment 1: After the target receives the time stamp information sent back by the four submersibles and the real-time position information of each submersible, the target runs an asynchronous algorithm to calculate its own position based on these information.
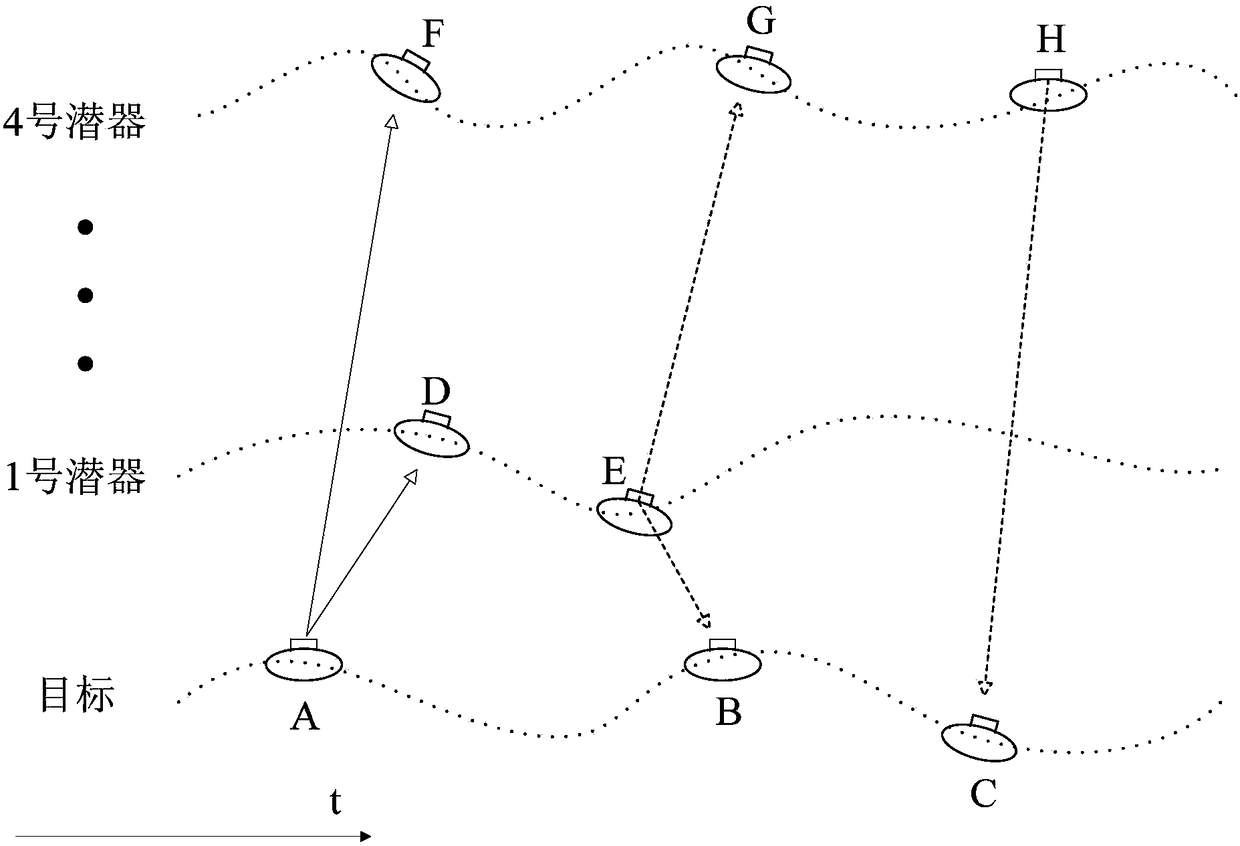
[0058] Because the clocks between the submersibles and between the submersible and the target are not synchronized, there is a clock deviation between the time stamps received by the target. In order to eliminate this effect, the method of making a difference between the time values under the same clock is used:
[0059] ΔT is =(t is -t ss )-(t ii -t si ), i=1,2,3,4
[0060]
[0061] recombine figure 2 , under the condition of considering the noise, the relationship between the time difference obtained above and the transmission delay between submersibles and between submersibles and targets is established:
[0062] ΔT is =τ si +τ' si +w is
[0063] ΔT ki =τ sk +τ ki -τ si +w ki
[0064...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More