

Adaptive neural network nonsingular terminal sliding mode control method for micro gyroscope
A non-singular terminal and neural network technology is applied in the field of non-singular terminal synovial control of micro-gyroscope adaptive neural network, which can solve the problems of reducing the sensitivity and accuracy of micro-gyroscope, reducing system chattering, and easy fluctuation of parameter system parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0098] Go to step one:
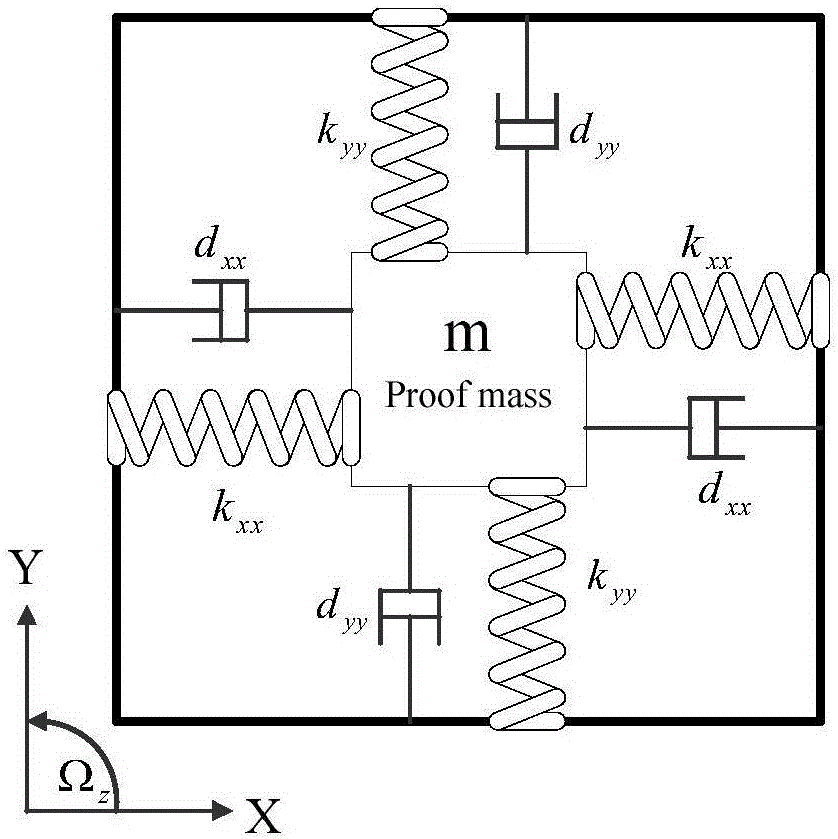
[0099] refer to figure 1 As shown, a general micro gyroscope is composed of the following parts: a mass block, support springs along the X and Y axis directions, an electrostatic drive device and an induction device, wherein the electrostatic drive device drives the mass block to vibrate along the direction of the drive axis, and the induction device The displacement and velocity of the mass in the direction of the detection axis can be detected.
[0100] Then, the mathematical model of the micro-gyroscope established in step 1 is:
[0101] m x ·· + d x x x · + ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More