

Direct contour control method of plane rectangular coordinate motion system
A plane Cartesian coordinates and motion system technology, applied in the direction of digital control, program control system, electrical program control, etc., can solve the problems of low precision and difficult adjustment, achieve high-precision contour control, simplify the adjustment process, and clarify the physical meaning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The implementation steps of the method of the present invention will be further described below in conjunction with the accompanying drawings and examples. It should be noted that the following examples are illustrative, not limiting, and the content covered by the present invention is not limited to the following examples.
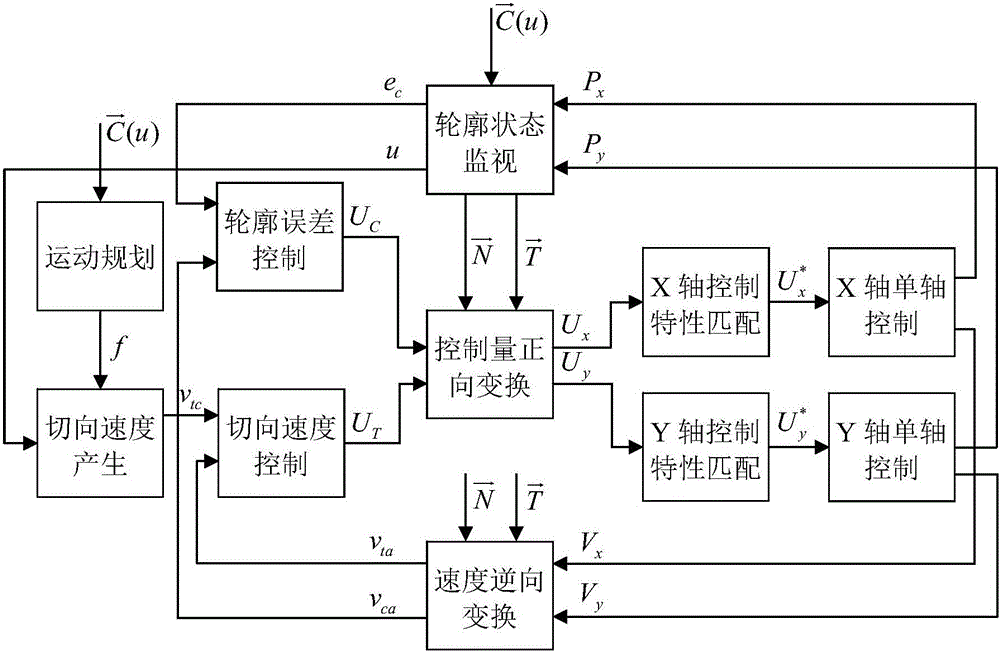
[0035] The direct contour control method of the planar Cartesian coordinate motion system is completed through the following 11 modular logical processing calculations. The specific steps are as follows:
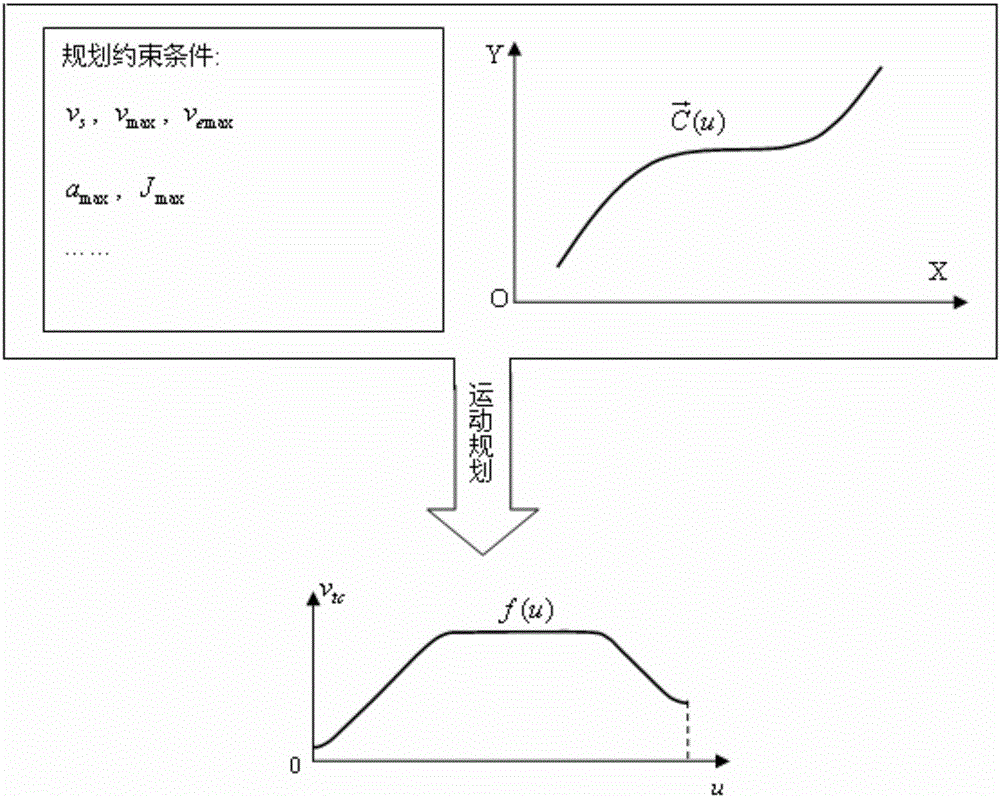
[0036] (1) Motion planning: generate contour motion tangential speed command planning; according to the programming contour input by the user Plan the contour motion process with the motion planning constraints, and generate the contour motion tangential velocity command v tc The relationship function f, v with the profile curve parameter u tc =f(u), for the subsequent real-time control link.
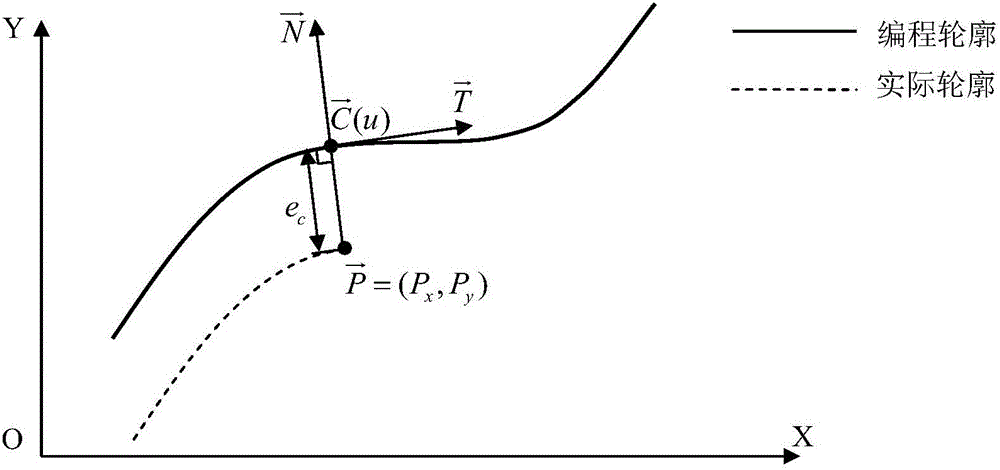
[0037] (2) Contour status monitoring: according ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More