

A Target Tracking Control Method for Wheeled Mobile Robot Based on Point Stabilization
A mobile robot and target tracking technology, applied in the field of target tracking control of wheeled mobile robots based on point stabilization, can solve the problems of robot motion occlusion and target loss, and achieve the effects of low hardware requirements, simple structure and high control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
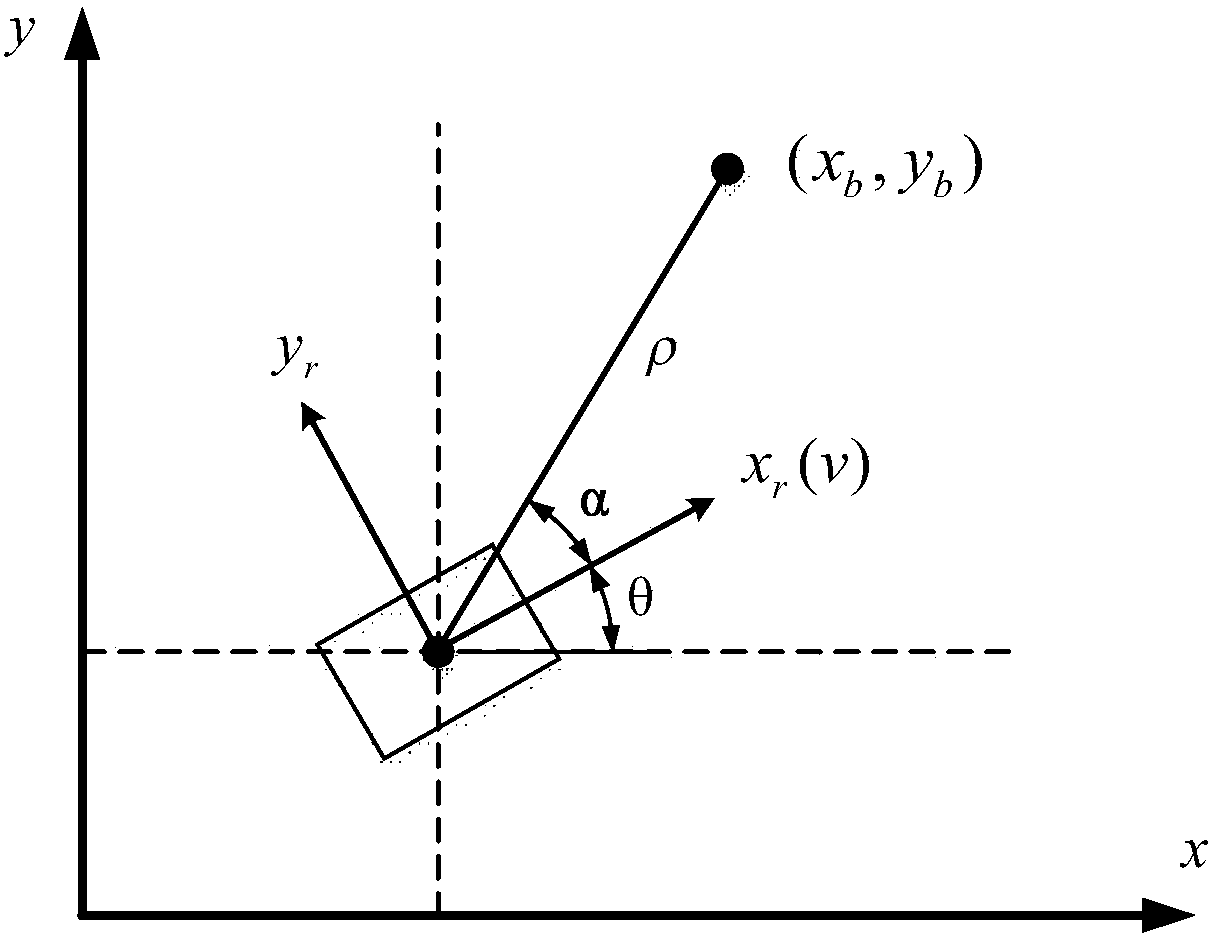
[0034] Below in conjunction with accompanying drawing, the present invention will be further described: the present invention is applicable to the wheeled mobile robot control system that has the external sensor such as monocular camera head, and its kinematics model and coordinate system are established as follows figure 1 shown. The system obtains the target deviation from the target ranging module, and designs a motion controller in combination with the expected tracking distance to control the wheeled mobile robot to continuously track the target.
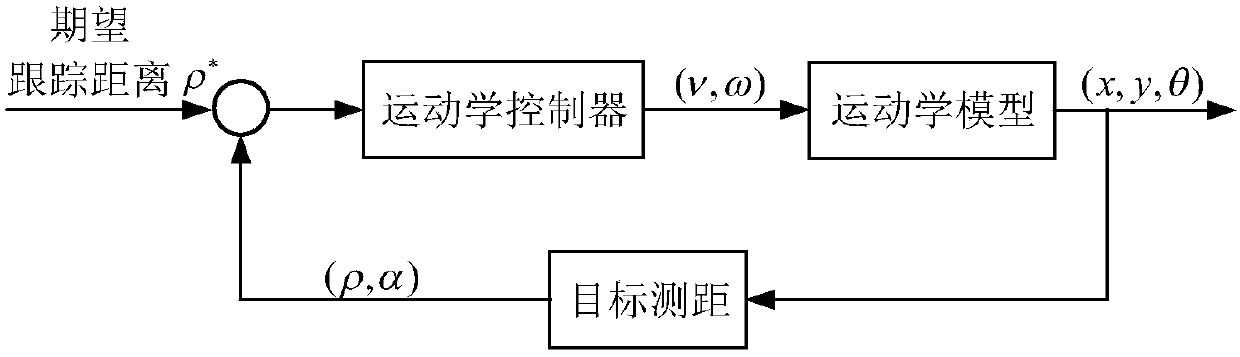
[0035] Such as figure 2 As shown, a target tracking control method for a wheeled mobile robot based on point stabilization, specifically includes the following steps:
[0036] (1) Analyze the wheeled mobile robot and establish a non-complete kinematics model of the wheeled mobile robot, specifically:
[0037]
[0038] Where (x, y) is the coordinates of the robot in the world coordinate system, and θ is the heading angle o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More